 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeCudaSIFT-SLAM: multiple-map visual SLAM for full procedure mapping in real human endoscopy
May 27, 2024


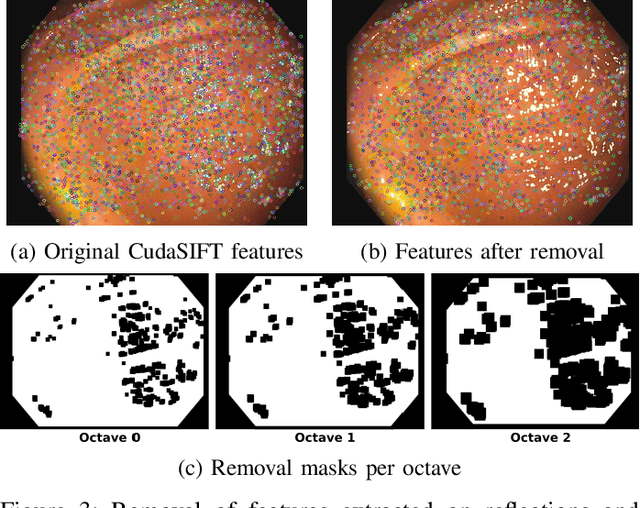
Monocular visual simultaneous localization and mapping (V-SLAM) is nowadays an irreplaceable tool in mobile robotics and augmented reality, where it performs robustly. However, human colonoscopies pose formidable challenges like occlusions, blur, light changes, lack of texture, deformation, water jets or tool interaction, which result in very frequent tracking losses. ORB-SLAM3, the top performing multiple-map V-SLAM, is unable to recover from them by merging sub-maps or relocalizing the camera, due to the poor performance of its place recognition algorithm based on ORB features and DBoW2 bag-of-words. We present CudaSIFT-SLAM, the first V-SLAM system able to process complete human colonoscopies in real-time. To overcome the limitations of ORB-SLAM3, we use SIFT instead of ORB features and replace the DBoW2 direct index with the more computationally demanding brute-force matching, being able to successfully match images separated in time for relocation and map merging. Real-time performance is achieved thanks to CudaSIFT, a GPU implementation for SIFT extraction and brute-force matching. We benchmark our system in the C3VD phantom colon dataset, and in a full real colonoscopy from the Endomapper dataset, demonstrating the capabilities to merge sub-maps and relocate in them, obtaining significantly longer sub-maps. Our system successfully maps in real-time 88 % of the frames in the C3VD dataset. In a real screening colonoscopy, despite the much higher prevalence of occluded and blurred frames, the mapping coverage is 53 % in carefully explored areas and 38 % in the full sequence, a 70 % improvement over ORB-SLAM3.
EndoMapper dataset of complete calibrated endoscopy procedures
Apr 29, 2022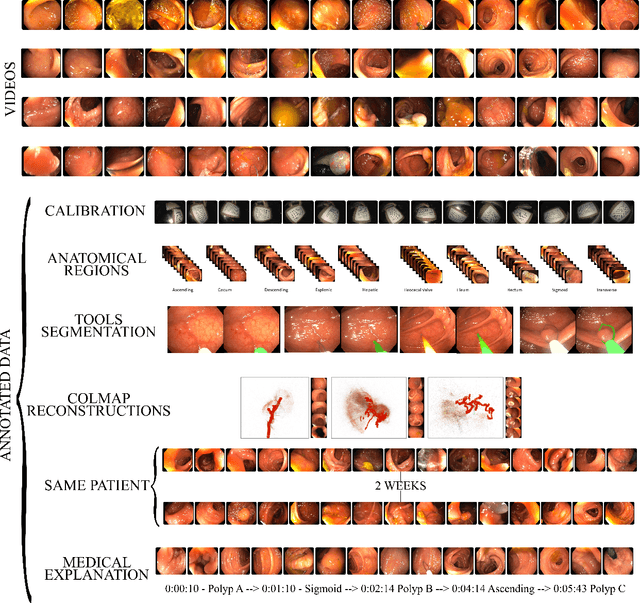
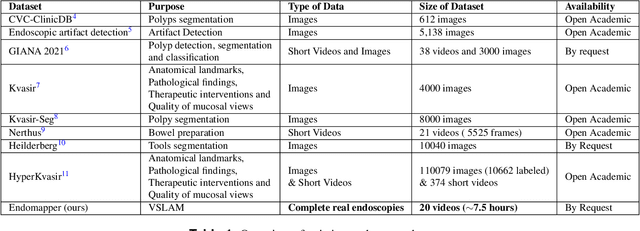
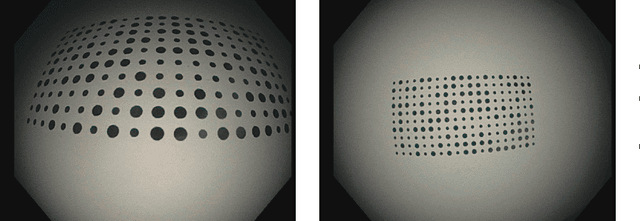

Computer-assisted systems are becoming broadly used in medicine. In endoscopy, most research focuses on automatic detection of polyps or other pathologies, but localization and navigation of the endoscope is completely performed manually by physicians. To broaden this research and bring spatial Artificial Intelligence to endoscopies, data from complete procedures are needed. This data will be used to build a 3D mapping and localization systems that can perform special task like, for example, detect blind zones during exploration, provide automatic polyp measurements, guide doctors to a polyp found in a previous exploration and retrieve previous images of the same area aligning them for easy comparison. These systems will provide an improvement in the quality and precision of the procedures while lowering the burden on the physicians. This paper introduces the Endomapper dataset, the first collection of complete endoscopy sequences acquired during regular medical practice, including slow and careful screening explorations, making secondary use of medical data. Its original purpose is to facilitate the development and evaluation of VSLAM (Visual Simultaneous Localization and Mapping) methods in real endoscopy data. The first release of the dataset is composed of 59 sequences with more than 15 hours of video. It is also the first endoscopic dataset that includes both the computed geometric and photometric endoscope calibration with the original calibration videos. Meta-data and annotations associated to the dataset varies from anatomical landmark and description of the procedure labeling, tools segmentation masks, COLMAP 3D reconstructions, simulated sequences with groundtruth and meta-data related to special cases, such as sequences from the same patient. This information will improve the research in endoscopic VSLAM, as well as other research lines, and create new research lines.
ORB-SLAM3: An Accurate Open-Source Library for Visual, Visual-Inertial and Multi-Map SLAM
Jul 23, 2020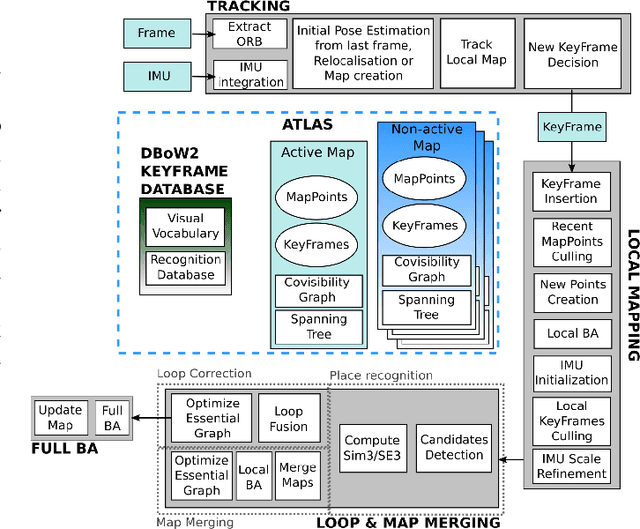
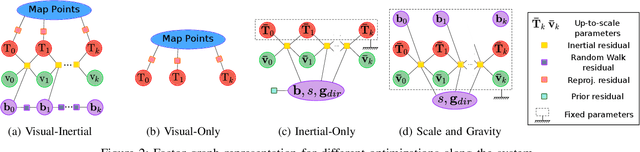
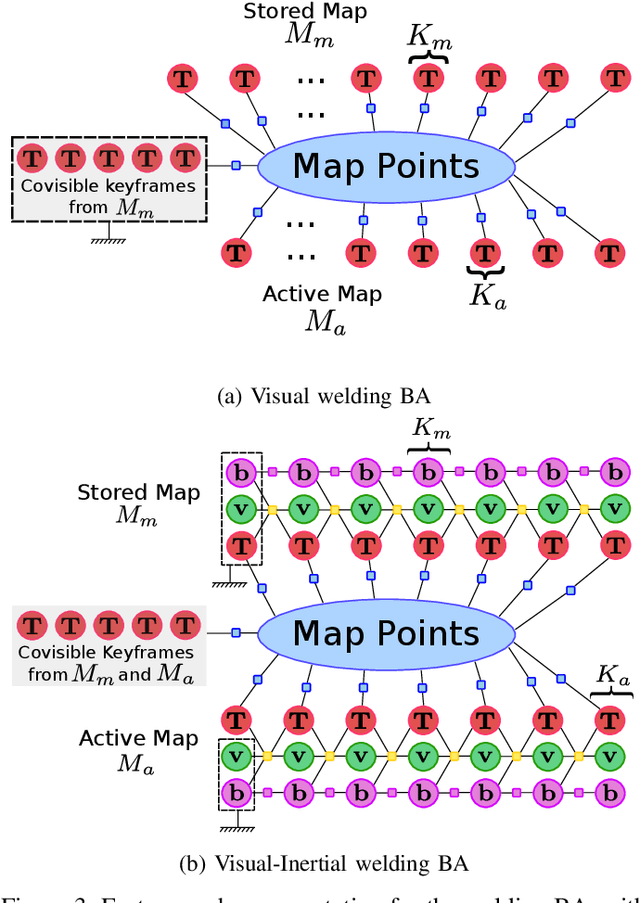
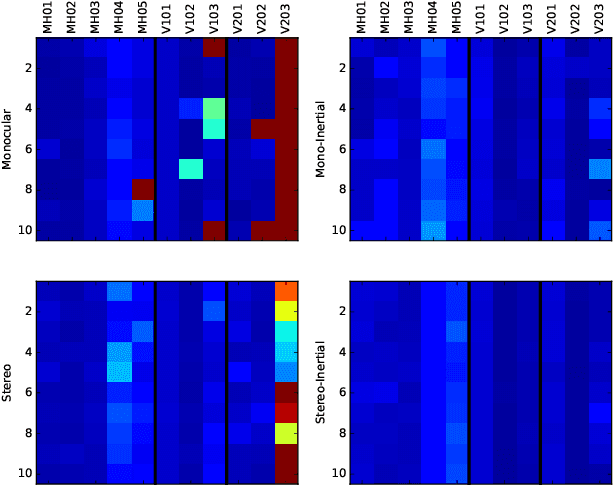
This paper presents ORB-SLAM3, the first system able to perform visual, visual-inertial and multi-map SLAM with monocular, stereo and RGB-D cameras, using pin-hole and fisheye lens models. The first main novelty is a feature-based tightly-integrated visual-inertial SLAM system that fully relies on Maximum-a-Posteriori (MAP) estimation, even during the IMU initialization phase. The result is a system that operates robustly in real-time, in small and large, indoor and outdoor environments, and is 2 to 5 times more accurate than previous approaches. The second main novelty is a multiple map system that relies on a new place recognition method with improved recall. Thanks to it, ORB-SLAM3 is able to survive to long periods of poor visual information: when it gets lost, it starts a new map that will be seamlessly merged with previous maps when revisiting mapped areas. Compared with visual odometry systems that only use information from the last few seconds, ORB-SLAM3 is the first system able to reuse in all the algorithm stages all previous information. This allows to include in bundle adjustment co-visible keyframes, that provide high parallax observations boosting accuracy, even if they are widely separated in time or if they come from a previous mapping session. Our experiments show that, in all sensor configurations, ORB-SLAM3 is as robust as the best systems available in the literature, and significantly more accurate. Notably, our stereo-inertial SLAM achieves an average accuracy of 3.6 cm on the EuRoC drone and 9 mm under quick hand-held motions in the room of TUM-VI dataset, a setting representative of AR/VR scenarios. For the benefit of the community we make public the source code.
ORBSLAM-Atlas: a robust and accurate multi-map system
Aug 30, 2019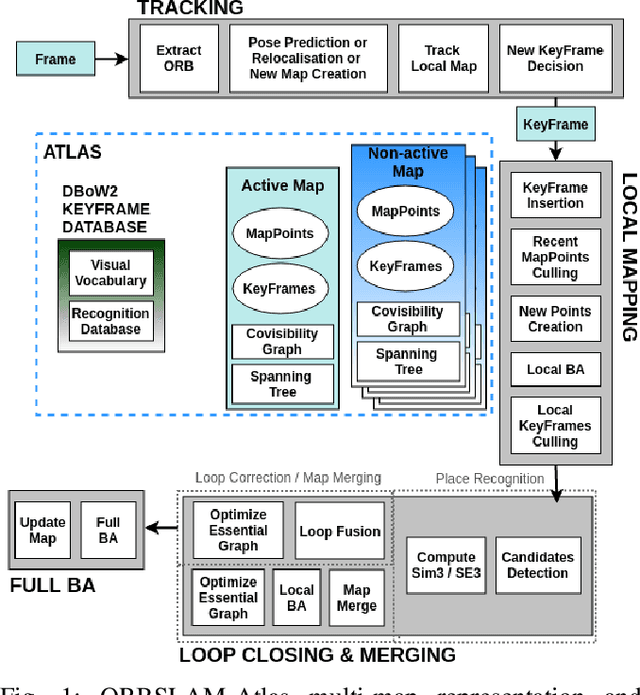
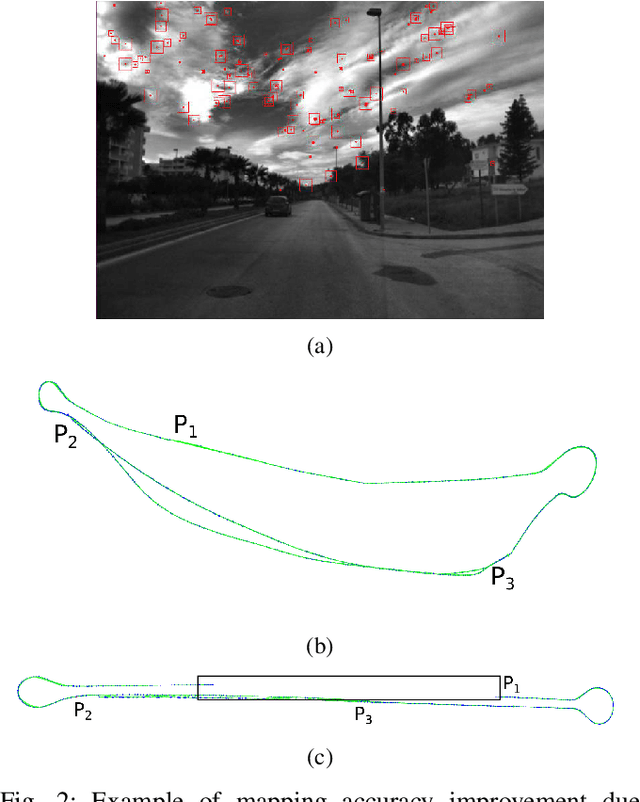
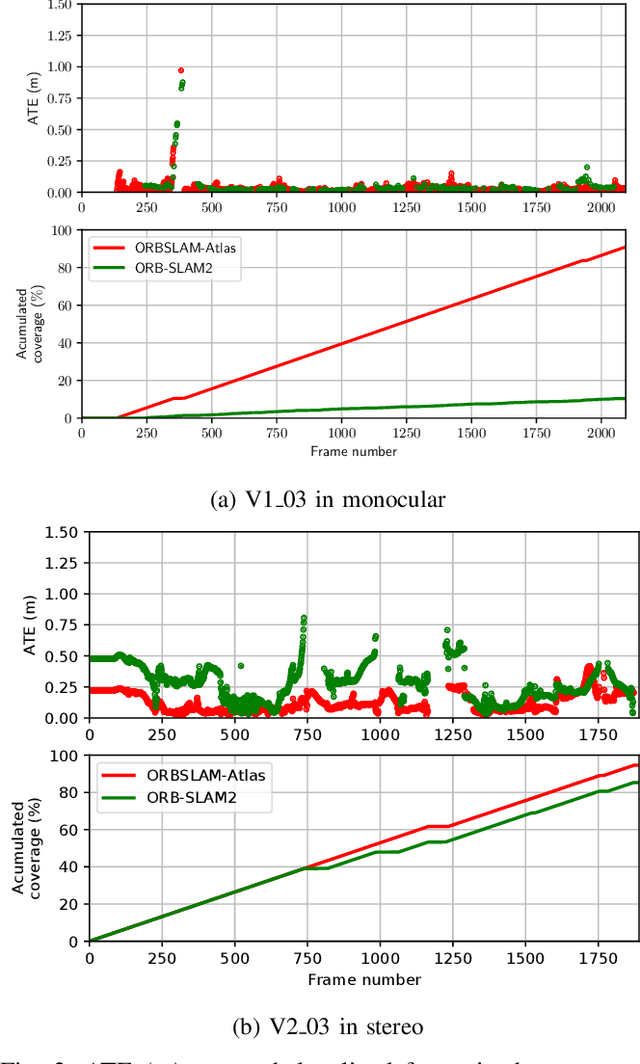
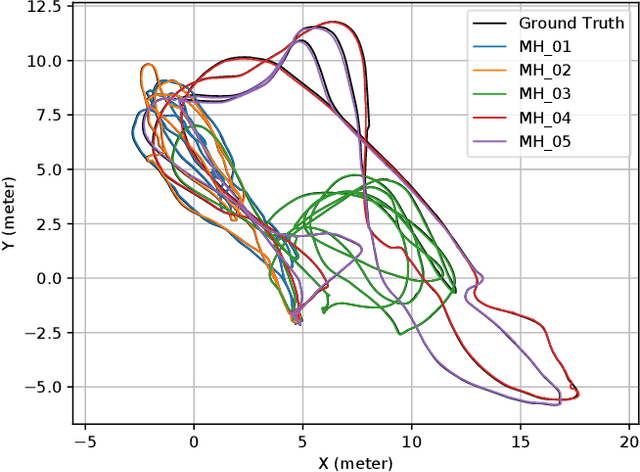
We propose ORBSLAM-Atlas, a system able to handle an unlimited number of disconnected sub-maps, that includes a robust map merging algorithm able to detect sub-maps with common regions and seamlessly fuse them. The outstanding robustness and accuracy of ORBSLAM are due to its ability to detect wide-baseline matches between keyframes, and to exploit them by means of non-linear optimization, however it only can handle a single map. ORBSLAM-Atlas brings the wide-baseline matching detection and exploitation to the multiple map arena. The result is a SLAM system significantly more general and robust, able to perform multi-session mapping. If tracking is lost during exploration, instead of freezing the map, a new sub-map is launched, and it can be fused with the previous map when common parts are visited. Our criteria to declare the camera lost contrast with previous approaches that simply count the number of tracked points, we propose to discard also inaccurately estimated camera poses due to bad geometrical conditioning. As a result, the map is split into more accurate sub-maps, that are eventually merged in a more accurate global map, thanks to the multi-mapping capabilities. We provide extensive experimental validation in the EuRoC datasets, where ORBSLAM-Atlas obtains accurate monocular and stereo results in the difficult sequences where ORBSLAM failed. We also build global maps after multiple sessions in the same room, obtaining the best results to date, between 2 and 3 times more accurate than competing multi-map approaches. We also show the robustness and capability of our system to deal with dynamic scenes, quantitatively in the EuRoC datasets and qualitatively in a densely populated corridor where camera occlusions and tracking losses are frequent.