 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeExplORB-SLAM: Active Visual SLAM Exploiting the Pose-graph Topology
Sep 08, 2022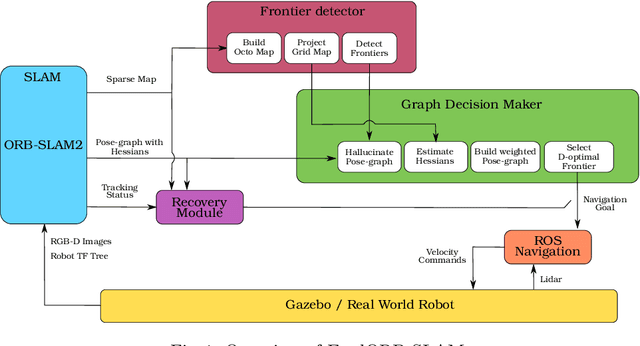
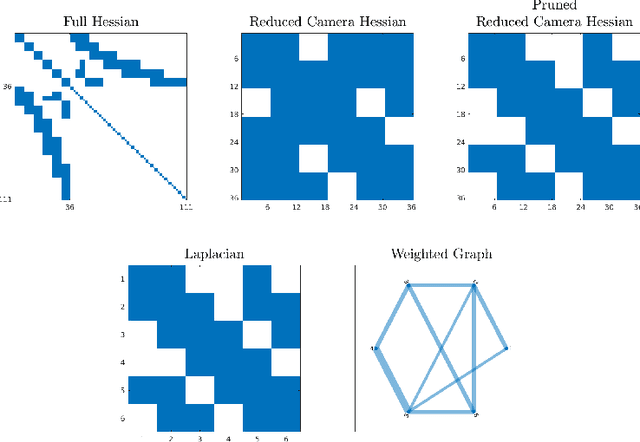
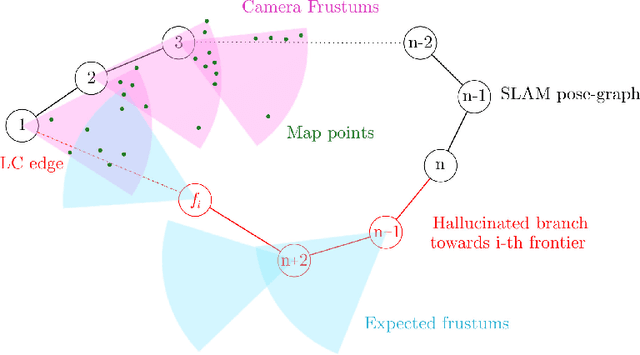
Deploying autonomous robots capable of exploring unknown environments has long been a topic of great relevance to the robotics community. In this work, we take a further step in that direction by presenting an open-source active visual SLAM framework that leverages the accuracy of a state-of-the-art graph-SLAM system and takes advantage of the fast utility computation that exploiting the structure of the underlying pose-graph offers. Through careful estimation of a posteriori weighted pose-graphs, D-optimal decision-making is achieved online with the objective of improving localization and mapping uncertainties as exploration occurs.
SD-DefSLAM: Semi-Direct Monocular SLAM for Deformable and Intracorporeal Scenes
Oct 19, 2020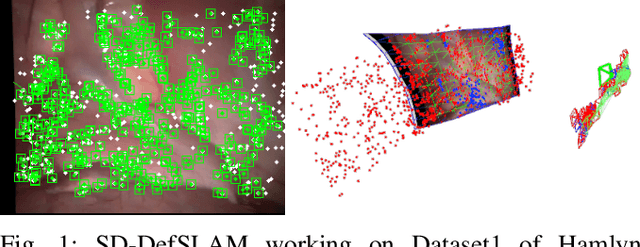
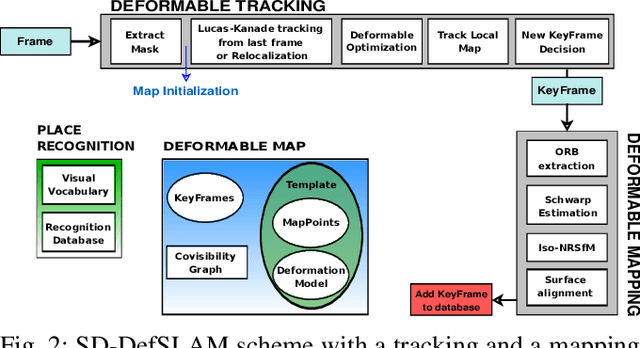
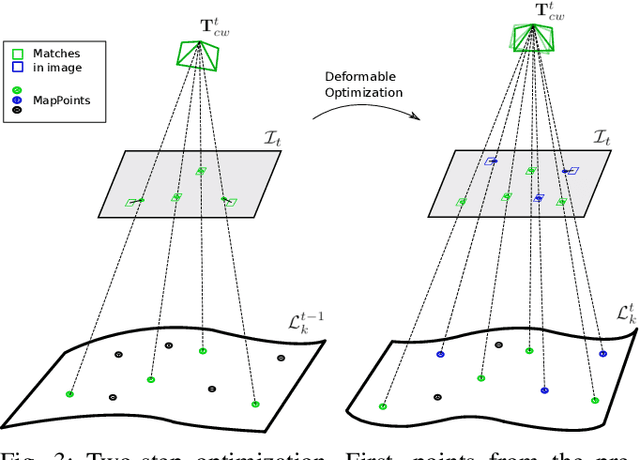
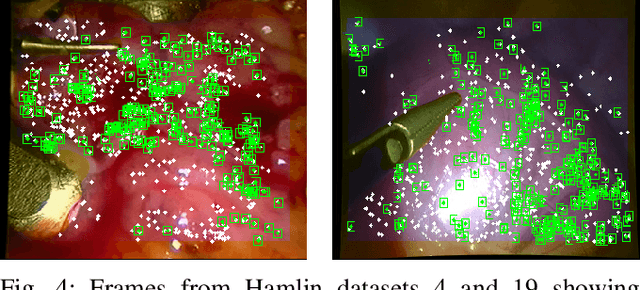
Conventional SLAM techniques strongly rely on scene rigidity to solve data association, ignoring dynamic parts of the scene. In this work we present Semi-Direct DefSLAM (SD-DefSLAM), a novel monocular deformable SLAM method able to map highly deforming environments, built on top of DefSLAM. To robustly solve data association in challenging deforming scenes, SD-DefSLAM combines direct and indirect methods: an enhanced illumination-invariant Lucas-Kanade tracker for data association, geometric Bundle Adjustment for pose and deformable map estimation, and bag-of-words based on feature descriptors for camera relocation. Dynamic objects are detected and segmented-out using a CNN trained for the specific application domain. We thoroughly evaluate our system in two public datasets. The mandala dataset is a SLAM benchmark with increasingly aggressive deformations. The Hamlyn dataset contains intracorporeal sequences that pose serious real-life challenges beyond deformation like weak texture, specular reflections, surgical tools and occlusions. Our results show that SD-DefSLAM outperforms DefSLAM in point tracking, reconstruction accuracy and scale drift thanks to the improvement in all the data association steps, being the first system able to robustly perform SLAM inside the human body.
ORB-SLAM3: An Accurate Open-Source Library for Visual, Visual-Inertial and Multi-Map SLAM
Jul 23, 2020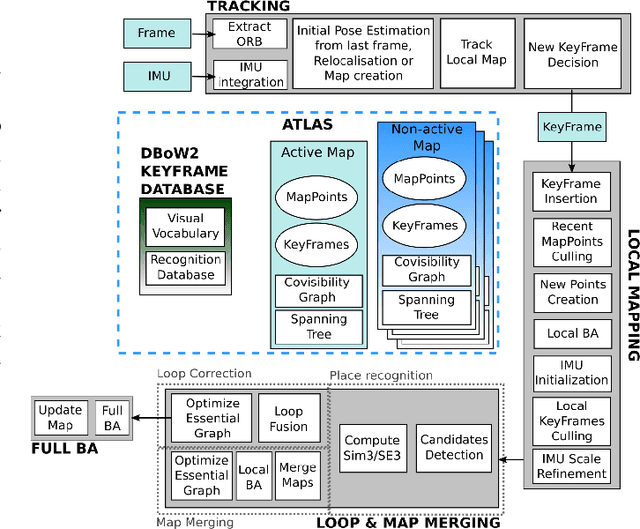
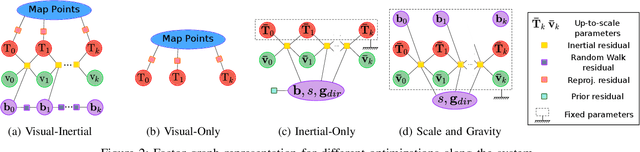
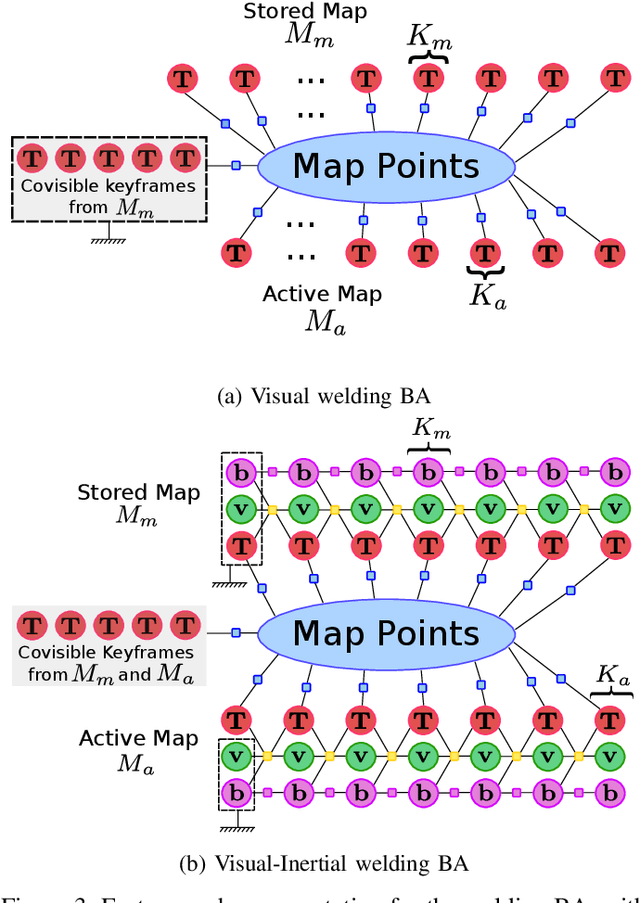
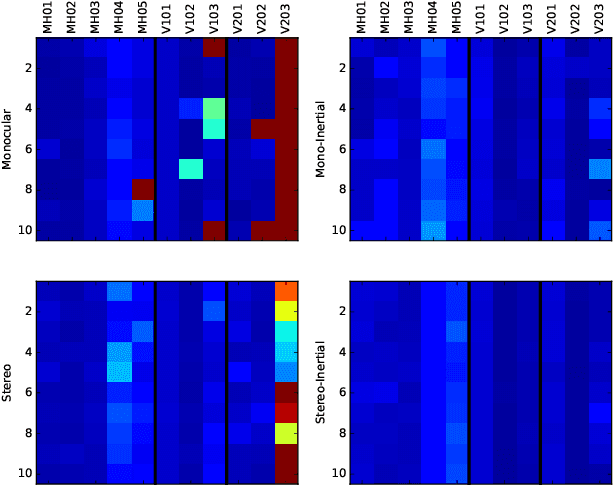
This paper presents ORB-SLAM3, the first system able to perform visual, visual-inertial and multi-map SLAM with monocular, stereo and RGB-D cameras, using pin-hole and fisheye lens models. The first main novelty is a feature-based tightly-integrated visual-inertial SLAM system that fully relies on Maximum-a-Posteriori (MAP) estimation, even during the IMU initialization phase. The result is a system that operates robustly in real-time, in small and large, indoor and outdoor environments, and is 2 to 5 times more accurate than previous approaches. The second main novelty is a multiple map system that relies on a new place recognition method with improved recall. Thanks to it, ORB-SLAM3 is able to survive to long periods of poor visual information: when it gets lost, it starts a new map that will be seamlessly merged with previous maps when revisiting mapped areas. Compared with visual odometry systems that only use information from the last few seconds, ORB-SLAM3 is the first system able to reuse in all the algorithm stages all previous information. This allows to include in bundle adjustment co-visible keyframes, that provide high parallax observations boosting accuracy, even if they are widely separated in time or if they come from a previous mapping session. Our experiments show that, in all sensor configurations, ORB-SLAM3 is as robust as the best systems available in the literature, and significantly more accurate. Notably, our stereo-inertial SLAM achieves an average accuracy of 3.6 cm on the EuRoC drone and 9 mm under quick hand-held motions in the room of TUM-VI dataset, a setting representative of AR/VR scenarios. For the benefit of the community we make public the source code.