 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeExplORB-SLAM: Active Visual SLAM Exploiting the Pose-graph Topology
Sep 08, 2022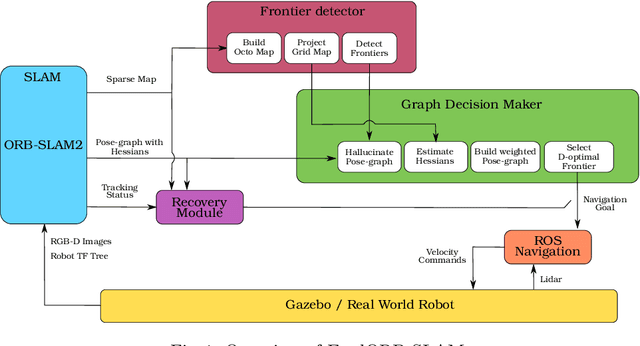
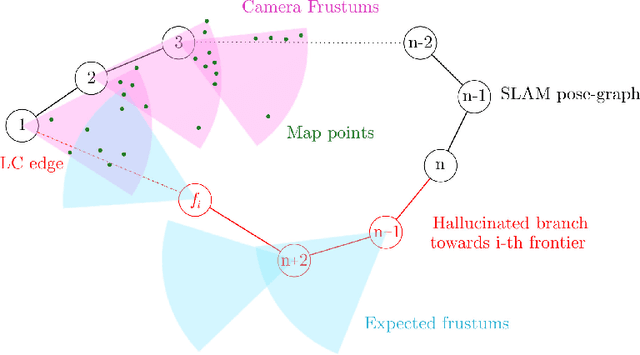
Deploying autonomous robots capable of exploring unknown environments has long been a topic of great relevance to the robotics community. In this work, we take a further step in that direction by presenting an open-source active visual SLAM framework that leverages the accuracy of a state-of-the-art graph-SLAM system and takes advantage of the fast utility computation that exploiting the structure of the underlying pose-graph offers. Through careful estimation of a posteriori weighted pose-graphs, D-optimal decision-making is achieved online with the objective of improving localization and mapping uncertainties as exploration occurs.
A Survey on Active Simultaneous Localization and Mapping: State of the Art and New Frontiers
Jul 01, 2022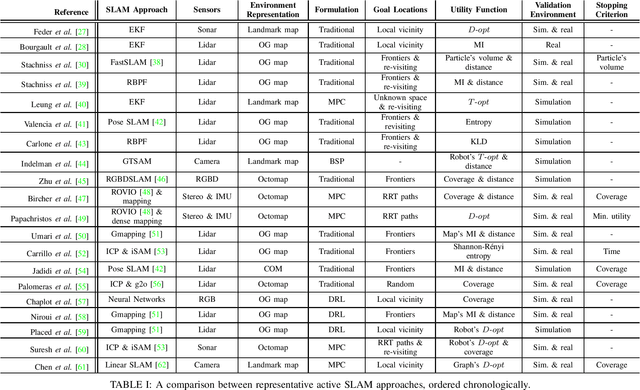
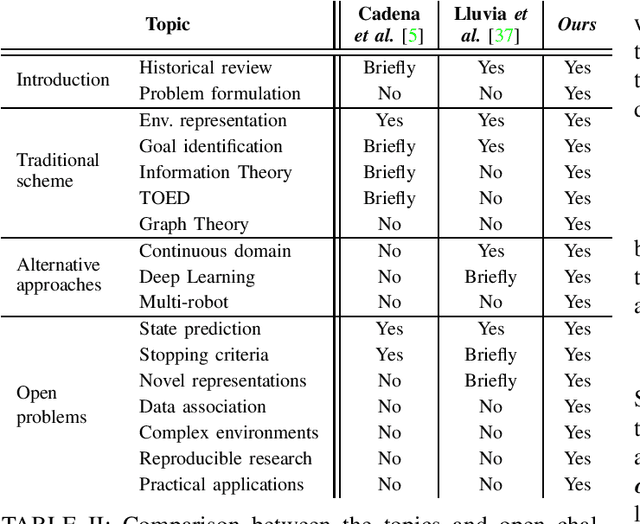
Active Simultaneous Localization and Mapping (SLAM) is the problem of planning and controlling the motion of a robot to build the most accurate and complete model of the surrounding environment. Since the first foundational work in active perception appeared, more than three decades ago, this field has received increasing attention across different scientific communities. This has brought about many different approaches and formulations, and makes a review of the current trends necessary and extremely valuable for both new and experienced researchers. In this work, we survey the state-of-the-art in active SLAM and take an in-depth look at the open challenges that still require attention to meet the needs of modern applications. % in order to achieve real-world deployment. After providing a historical perspective, we present a unified problem formulation and review the classical solution scheme, which decouples the problem into three stages that identify, select, and execute potential navigation actions. We then analyze alternative approaches, including belief-space planning and modern techniques based on deep reinforcement learning, and review related work on multi-robot coordination. The manuscript concludes with a discussion of new research directions, addressing reproducible research, active spatial perception, and practical applications, among other topics.
Enough is Enough: Towards Autonomous Uncertainty-driven Stopping Criteria
Apr 22, 2022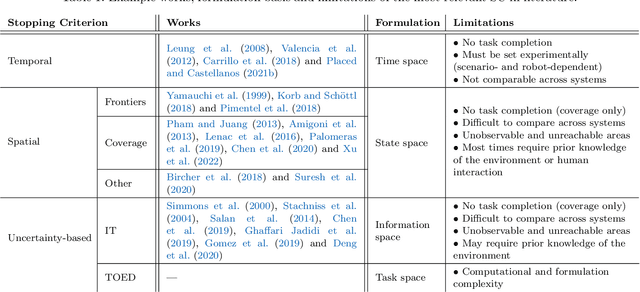
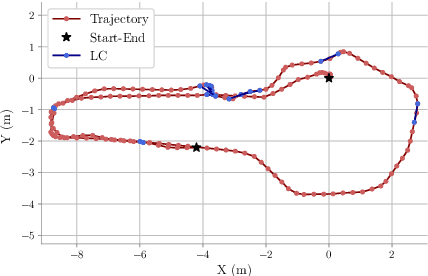
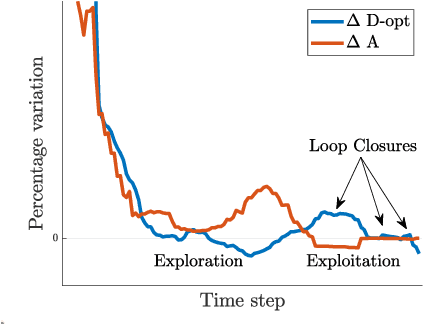
Autonomous robotic exploration has long attracted the attention of the robotics community and is a topic of high relevance. Deploying such systems in the real world, however, is still far from being a reality. In part, it can be attributed to the fact that most research is directed towards improving existing algorithms and testing novel formulations in simulation environments rather than addressing practical issues of real-world scenarios. This is the case of the fundamental problem of autonomously deciding when exploration has to be terminated or changed (stopping criteria), which has not received any attention recently. In this paper, we discuss the importance of using appropriate stopping criteria and analyse the behaviour of a novel criterion based on the evolution of optimality criteria in active graph-SLAM.
Fast Autonomous Robotic Exploration Using the Underlying Graph Structure
Apr 22, 2022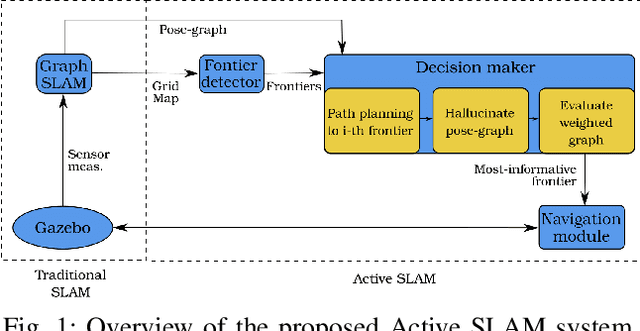


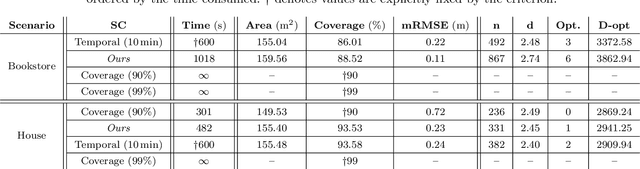
In this work, we fully define the existing relationships between traditional optimality criteria and the connectivity of the underlying pose-graph in Active SLAM, characterizing, therefore, the connection between Graph Theory and the Theory Optimal Experimental Design. We validate the proposed relationships in 2D and 3D graph SLAM datasets, showing a remarkable relaxation of the computational load when using the graph structure. Furthermore, we present a novel Active SLAM framework which outperforms traditional methods by successfully leveraging the graphical facet of the problem so as to autonomously explore an unknown environment.
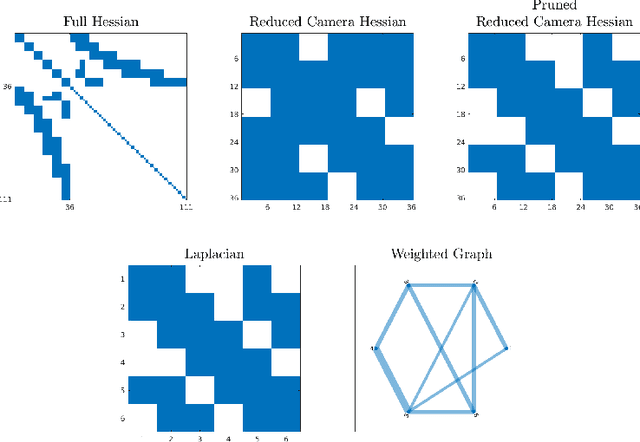
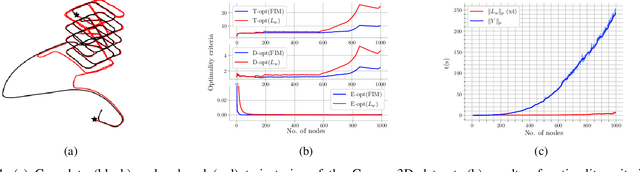
Fast Uncertainty Quantification for Active Graph SLAM
Oct 04, 2021
Quantifying uncertainty is a key stage in autonomous robotic exploration, since it allows to identify the most informative actions to execute. However, dealing with full Fisher Information matrices (FIM) is computationally heavy and may become intractable for online systems. In this work, we study the paradigm of Active graph SLAM formulated over $\textit{SE(n)}$, and propose a general relationship between the full FIM and the Laplacian matrix of the underlying pose-graph. Therefore, the optimal set of actions can be estimated by maximizing optimality criteria of the weighted Laplacian instead of that of the FIM. Experimental validation proves our method leads to equivalent results in a fraction of the time traditional methods require. Based on the former, we present an online Active graph SLAM system capable of selecting D-optimal actions and that outperforms other state-of-the-art methods that rely on slower computations. Also, we propose the use of such indices as stopping criterion, making our system capable of autonomously determining when the exploration strategy is no longer adding information to the graph SLAM algorithm and it should be either changed or terminated.