 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeA Survey on Active Simultaneous Localization and Mapping: State of the Art and New Frontiers
Paper and Code
Jul 01, 2022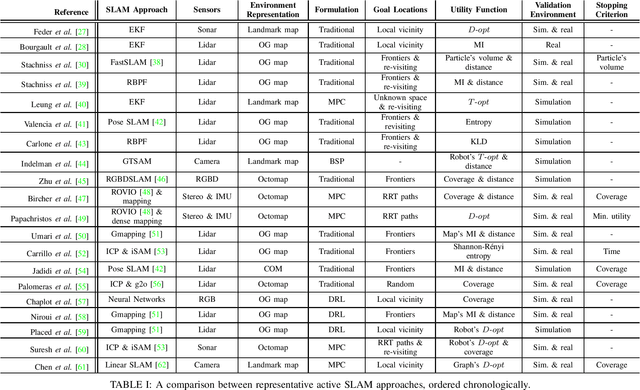
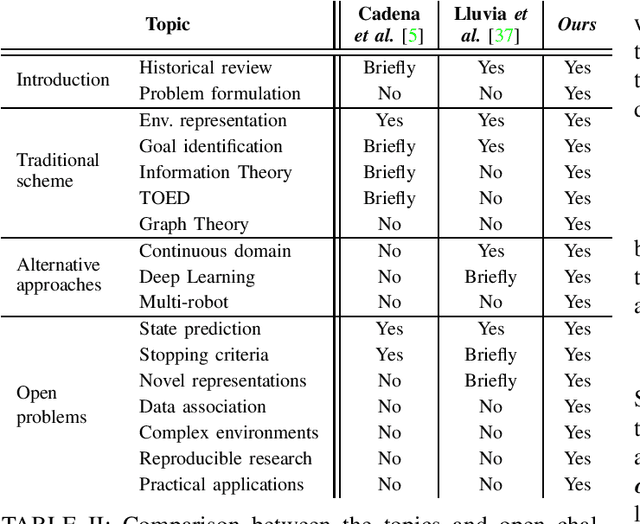
Active Simultaneous Localization and Mapping (SLAM) is the problem of planning and controlling the motion of a robot to build the most accurate and complete model of the surrounding environment. Since the first foundational work in active perception appeared, more than three decades ago, this field has received increasing attention across different scientific communities. This has brought about many different approaches and formulations, and makes a review of the current trends necessary and extremely valuable for both new and experienced researchers. In this work, we survey the state-of-the-art in active SLAM and take an in-depth look at the open challenges that still require attention to meet the needs of modern applications. % in order to achieve real-world deployment. After providing a historical perspective, we present a unified problem formulation and review the classical solution scheme, which decouples the problem into three stages that identify, select, and execute potential navigation actions. We then analyze alternative approaches, including belief-space planning and modern techniques based on deep reinforcement learning, and review related work on multi-robot coordination. The manuscript concludes with a discussion of new research directions, addressing reproducible research, active spatial perception, and practical applications, among other topics.