Get our free extension to see links to code for papers anywhere online!Free add-on: code for papers everywhere!Free add-on: See code for papers anywhere!
 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeExplORB-SLAM: Active Visual SLAM Exploiting the Pose-graph Topology
Paper and Code
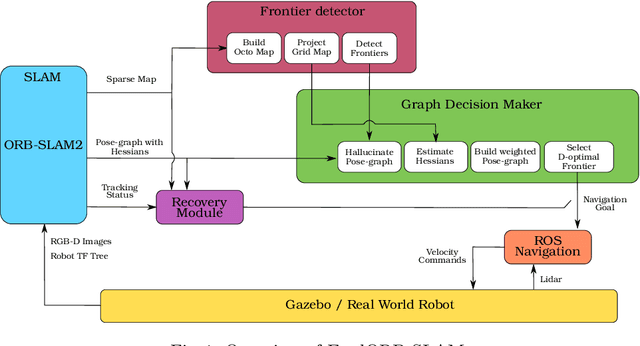
Deploying autonomous robots capable of exploring unknown environments has long been a topic of great relevance to the robotics community. In this work, we take a further step in that direction by presenting an open-source active visual SLAM framework that leverages the accuracy of a state-of-the-art graph-SLAM system and takes advantage of the fast utility computation that exploiting the structure of the underlying pose-graph offers. Through careful estimation of a posteriori weighted pose-graphs, D-optimal decision-making is achieved online with the objective of improving localization and mapping uncertainties as exploration occurs.
* 12 pages. To be presented in 5th Iberian Robotics Conference
View paper on