Get our free extension to see links to code for papers anywhere online!Free add-on: code for papers everywhere!Free add-on: See code for papers anywhere!
 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeFast Autonomous Robotic Exploration Using the Underlying Graph Structure
Paper and Code
Apr 22, 2022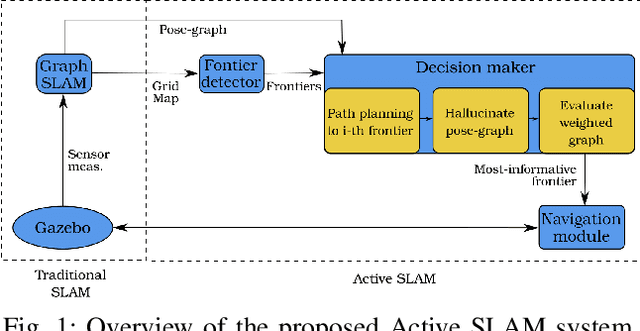


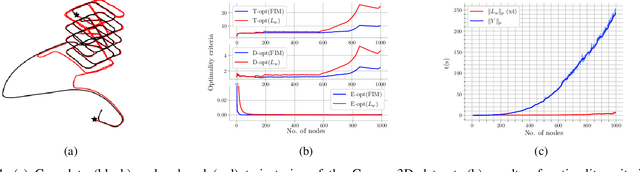
In this work, we fully define the existing relationships between traditional optimality criteria and the connectivity of the underlying pose-graph in Active SLAM, characterizing, therefore, the connection between Graph Theory and the Theory Optimal Experimental Design. We validate the proposed relationships in 2D and 3D graph SLAM datasets, showing a remarkable relaxation of the computational load when using the graph structure. Furthermore, we present a novel Active SLAM framework which outperforms traditional methods by successfully leveraging the graphical facet of the problem so as to autonomously explore an unknown environment.
* 2021 IEEE/RSJ International Conference on Intelligent Robots and
Systems (IROS). arXiv admin note: text overlap with arXiv:2110.01289
View paper on