 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeORB-SLAM3: An Accurate Open-Source Library for Visual, Visual-Inertial and Multi-Map SLAM
Paper and Code
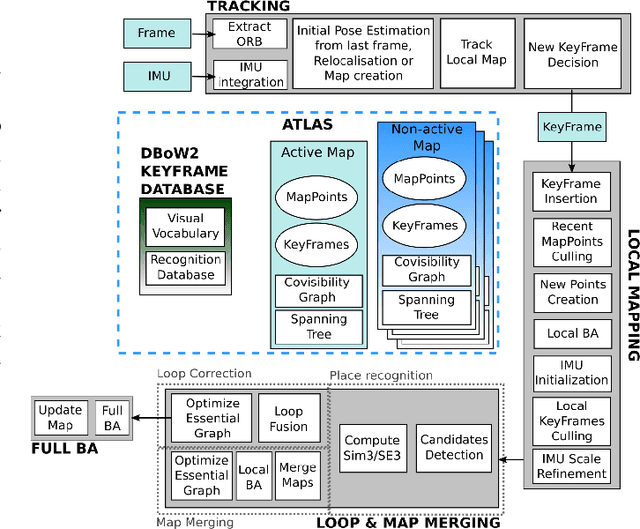
This paper presents ORB-SLAM3, the first system able to perform visual, visual-inertial and multi-map SLAM with monocular, stereo and RGB-D cameras, using pin-hole and fisheye lens models. The first main novelty is a feature-based tightly-integrated visual-inertial SLAM system that fully relies on Maximum-a-Posteriori (MAP) estimation, even during the IMU initialization phase. The result is a system that operates robustly in real-time, in small and large, indoor and outdoor environments, and is 2 to 5 times more accurate than previous approaches. The second main novelty is a multiple map system that relies on a new place recognition method with improved recall. Thanks to it, ORB-SLAM3 is able to survive to long periods of poor visual information: when it gets lost, it starts a new map that will be seamlessly merged with previous maps when revisiting mapped areas. Compared with visual odometry systems that only use information from the last few seconds, ORB-SLAM3 is the first system able to reuse in all the algorithm stages all previous information. This allows to include in bundle adjustment co-visible keyframes, that provide high parallax observations boosting accuracy, even if they are widely separated in time or if they come from a previous mapping session. Our experiments show that, in all sensor configurations, ORB-SLAM3 is as robust as the best systems available in the literature, and significantly more accurate. Notably, our stereo-inertial SLAM achieves an average accuracy of 3.6 cm on the EuRoC drone and 9 mm under quick hand-held motions in the room of TUM-VI dataset, a setting representative of AR/VR scenarios. For the benefit of the community we make public the source code.