 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeDrones4Good: Supporting Disaster Relief Through Remote Sensing and AI
Aug 09, 2023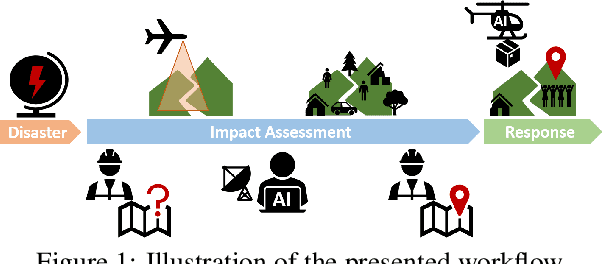

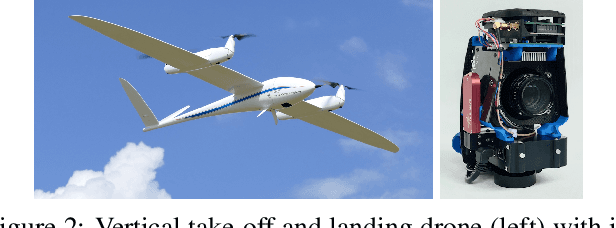

In order to respond effectively in the aftermath of a disaster, emergency services and relief organizations rely on timely and accurate information about the affected areas. Remote sensing has the potential to significantly reduce the time and effort required to collect such information by enabling a rapid survey of large areas. To achieve this, the main challenge is the automatic extraction of relevant information from remotely sensed data. In this work, we show how the combination of drone-based data with deep learning methods enables automated and large-scale situation assessment. In addition, we demonstrate the integration of onboard image processing techniques for the deployment of autonomous drone-based aid delivery. The results show the feasibility of a rapid and large-scale image analysis in the field, and that onboard image processing can increase the safety of drone-based aid deliveries.
Multiple Pedestrians and Vehicles Tracking in Aerial Imagery: A Comprehensive Study
Oct 19, 2020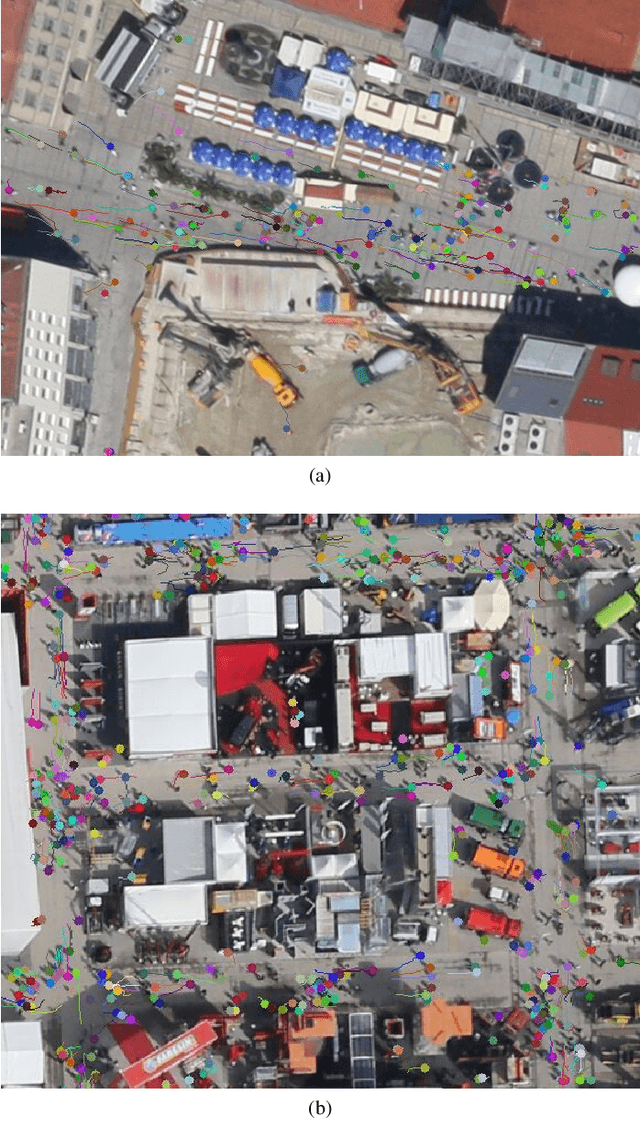
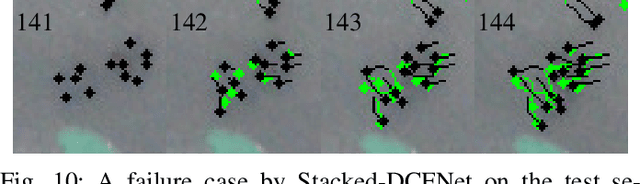
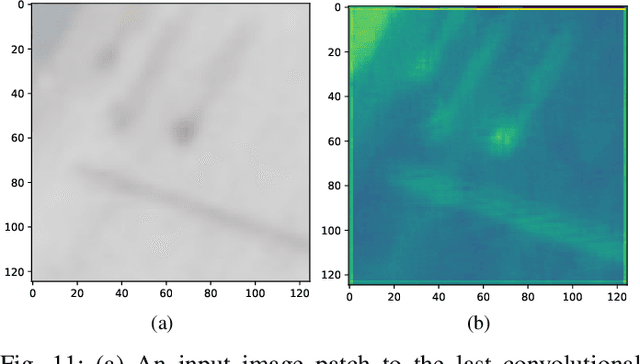
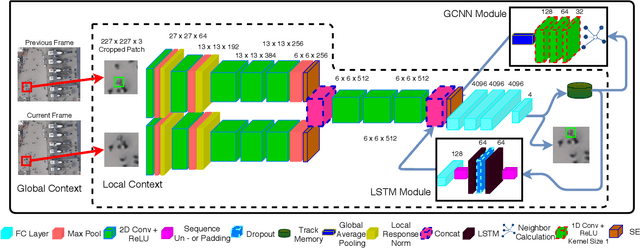
In this paper, we address various challenges in multi-pedestrian and vehicle tracking in high-resolution aerial imagery by intensive evaluation of a number of traditional and Deep Learning based Single- and Multi-Object Tracking methods. We also describe our proposed Deep Learning based Multi-Object Tracking method AerialMPTNet that fuses appearance, temporal, and graphical information using a Siamese Neural Network, a Long Short-Term Memory, and a Graph Convolutional Neural Network module for a more accurate and stable tracking. Moreover, we investigate the influence of the Squeeze-and-Excitation layers and Online Hard Example Mining on the performance of AerialMPTNet. To the best of our knowledge, we are the first in using these two for a regression-based Multi-Object Tracking. Additionally, we studied and compared the L1 and Huber loss functions. In our experiments, we extensively evaluate AerialMPTNet on three aerial Multi-Object Tracking datasets, namely AerialMPT and KIT AIS pedestrian and vehicle datasets. Qualitative and quantitative results show that AerialMPTNet outperforms all previous methods for the pedestrian datasets and achieves competitive results for the vehicle dataset. In addition, Long Short-Term Memory and Graph Convolutional Neural Network modules enhance the tracking performance. Moreover, using Squeeze-and-Excitation and Online Hard Example Mining significantly helps for some cases while degrades the results for other cases. In addition, according to the results, L1 yields better results with respect to Huber loss for most of the scenarios. The presented results provide a deep insight into challenges and opportunities of the aerial Multi-Object Tracking domain, paving the way for future research.
EAGLE: Large-scale Vehicle Detection Dataset inReal-World Scenarios using Aerial Imagery
Jul 17, 2020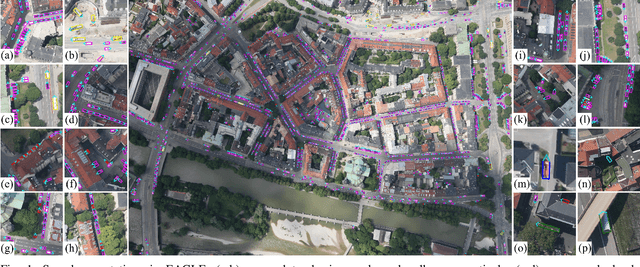
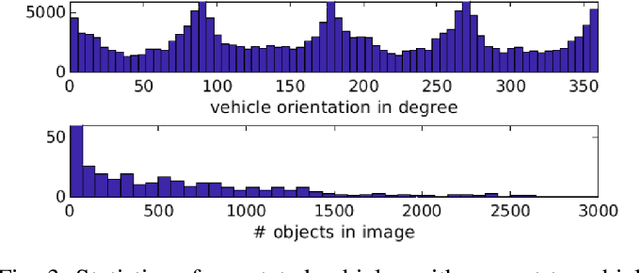
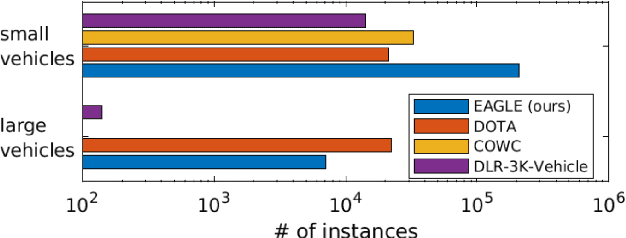
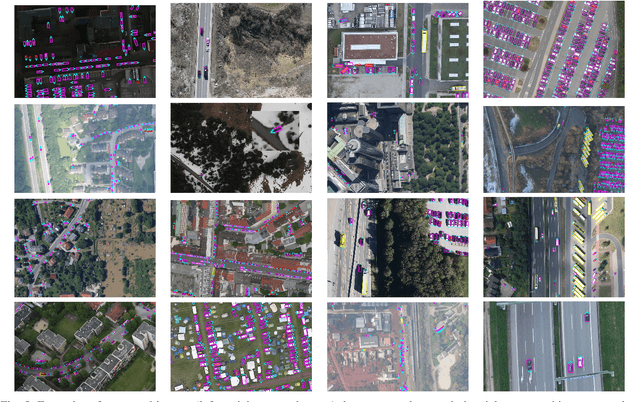
Multi-class vehicle detection from airborne imagery with orientation estimation is an important task in the near and remote vision domains with applications in traffic monitoring and disaster management. In the last decade, we have witnessed significant progress in object detection in ground imagery, but it is still in its infancy in airborne imagery, mostly due to the scarcity of diverse and large-scale datasets. Despite being a useful tool for different applications, current airborne datasets only partially reflect the challenges of real-world scenarios. To address this issue, we introduce EAGLE (oriEnted vehicle detection using Aerial imaGery in real-worLd scEnarios), a large-scale dataset for multi-class vehicle detection with object orientation information in aerial imagery. It features high-resolution aerial images composed of different real-world situations with a wide variety of camera sensor, resolution, flight altitude, weather, illumination, haze, shadow, time, city, country, occlusion, and camera angle. The annotation was done by airborne imagery experts with small- and large-vehicle classes. EAGLE contains 215,986 instances annotated with oriented bounding boxes defined by four points and orientation, making it by far the largest dataset to date in this task. It also supports researches on the haze and shadow removal as well as super-resolution and in-painting applications. We define three tasks: detection by (1) horizontal bounding boxes, (2) rotated bounding boxes, and (3) oriented bounding boxes. We carried out several experiments to evaluate several state-of-the-art methods in object detection on our dataset to form a baseline. Experiments show that the EAGLE dataset accurately reflects real-world situations and correspondingly challenging applications.
AerialMPTNet: Multi-Pedestrian Tracking in Aerial Imagery Using Temporal and Graphical Features
Jun 27, 2020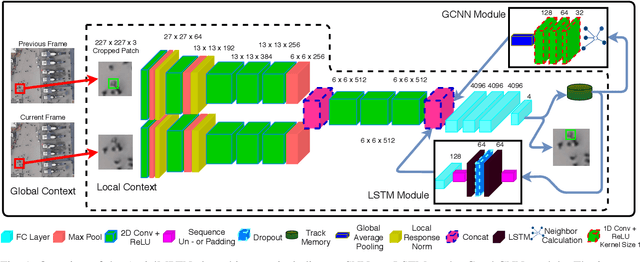
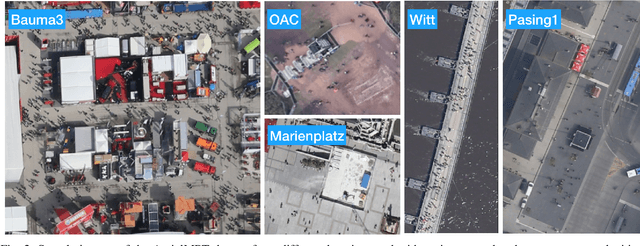
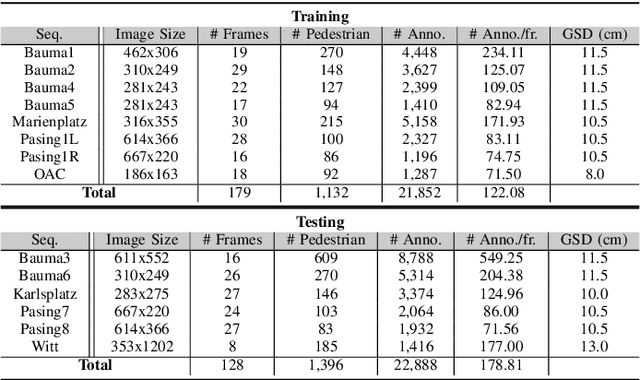
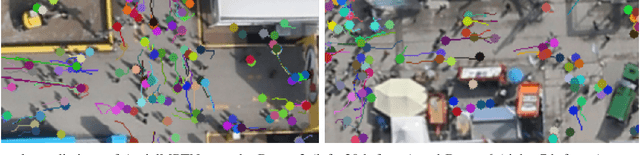
Multi-pedestrian tracking in aerial imagery has several applications such as large-scale event monitoring, disaster management, search-and-rescue missions, and as input into predictive crowd dynamic models. Due to the challenges such as the large number and the tiny size of the pedestrians (e.g., 4 x 4 pixels) with their similar appearances as well as different scales and atmospheric conditions of the images with their extremely low frame rates (e.g., 2 fps), current state-of-the-art algorithms including the deep learning-based ones are unable to perform well. In this paper, we propose AerialMPTNet, a novel approach for multi-pedestrian tracking in geo-referenced aerial imagery by fusing appearance features from a Siamese Neural Network, movement predictions from a Long Short-Term Memory, and pedestrian interconnections from a GraphCNN. In addition, to address the lack of diverse aerial pedestrian tracking datasets, we introduce the Aerial Multi-Pedestrian Tracking (AerialMPT) dataset consisting of 307 frames and 44,740 pedestrians annotated. We believe that AerialMPT is the largest and most diverse dataset to this date and will be released publicly. We evaluate AerialMPTNet on AerialMPT and KIT AIS, and benchmark with several state-of-the-art tracking methods. Results indicate that AerialMPTNet significantly outperforms other methods on accuracy and time-efficiency.
MRCNet: Crowd Counting and Density Map Estimation in Aerial and Ground Imagery
Sep 27, 2019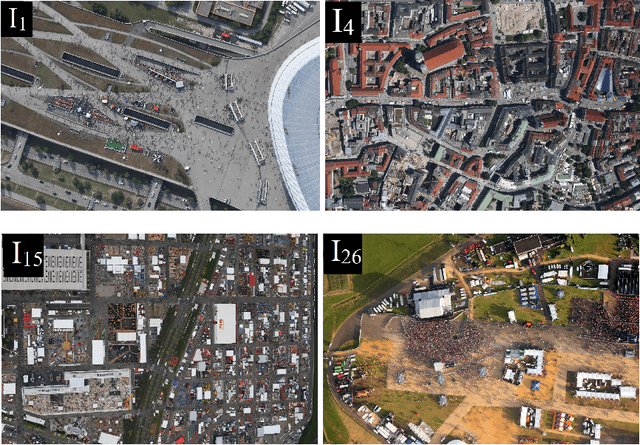
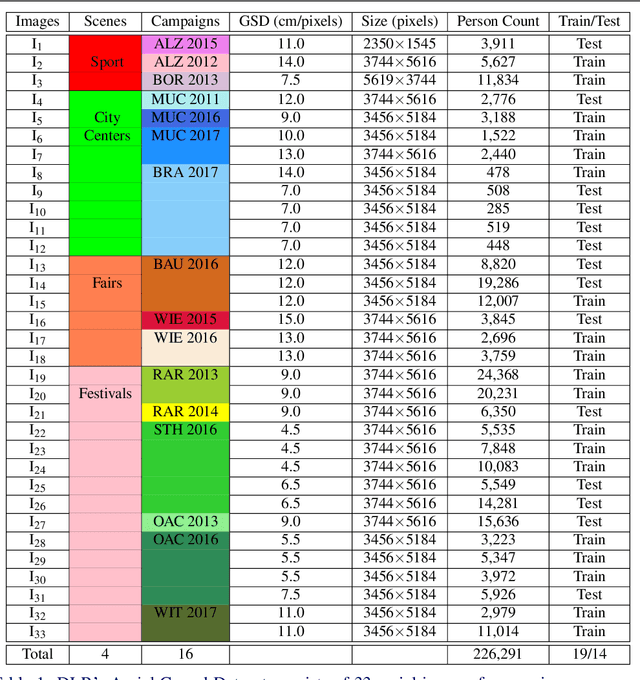


In spite of the many advantages of aerial imagery for crowd monitoring and management at mass events, datasets of aerial images of crowds are still lacking in the field. As a remedy, in this work we introduce a novel crowd dataset, the DLR Aerial Crowd Dataset (DLR-ACD), which is composed of 33 large aerial images acquired from 16 flight campaigns over mass events with 226,291 persons annotated. To the best of our knowledge, DLR-ACD is the first aerial crowd dataset and will be released publicly. To tackle the problem of accurate crowd counting and density map estimation in aerial images of crowds, this work also proposes a new encoder-decoder convolutional neural network, the so-called Multi-Resolution Crowd Network MRCNet. The encoder is based on the VGG-16 network and the decoder is composed of a set of bilinear upsampling and convolutional layers. Using two losses, one at an earlier level and another at the last level of the decoder, MRCNet estimates crowd counts and high-resolution crowd density maps as two different but interrelated tasks. In addition, MRCNet utilizes contextual and detailed local information by combining high- and low-level features through a number of lateral connections inspired by the Feature Pyramid Network (FPN) technique. We evaluated MRCNet on the proposed DLR-ACD dataset as well as on the ShanghaiTech dataset, a CCTV-based crowd counting benchmark. The results demonstrate that MRCNet outperforms the state-of-the-art crowd counting methods in estimating the crowd counts and density maps for both aerial and CCTV-based images.
Towards Multi-class Object Detection in Unconstrained Remote Sensing Imagery
Nov 01, 2018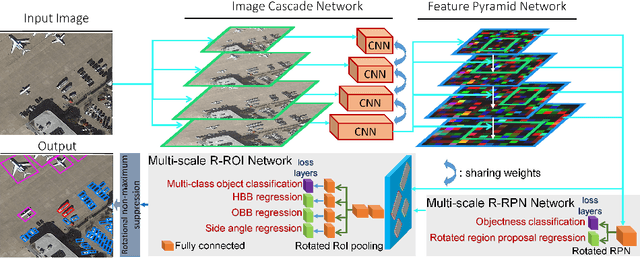
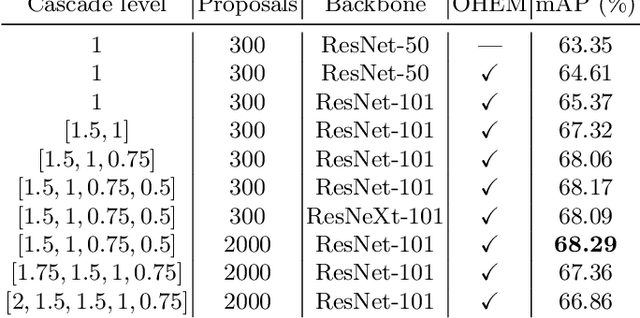
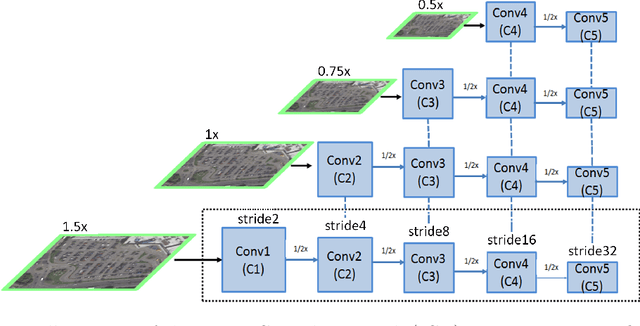

Automatic multi-class object detection in remote sensing images in unconstrained scenarios is of high interest for several applications including traffic monitoring and disaster management. The huge variation in object scale, orientation, category, and complex backgrounds, as well as the different camera sensors pose great challenges for current algorithms. In this work, we propose a new method consisting of a novel joint image cascade and feature pyramid network with multi-size convolution kernels to extract multi-scale strong and weak semantic features. These features are fed into rotation-based region proposal and region of interest networks to produce object detections. Finally, rotational non-maximum suppression is applied to remove redundant detections. During training, we minimize joint horizontal and oriented bounding box loss functions, as well as a novel loss that enforces oriented boxes to be rectangular. Our method achieves 68.16% mAP on horizontal and 72.45% mAP on oriented bounding box detection tasks on the challenging DOTA dataset, outperforming all published methods by a large margin (+6% and +12% absolute improvement, respectively). Furthermore, it generalizes to two other datasets, NWPU VHR-10 and UCAS-AOD, and achieves competitive results with the baselines even when trained on DOTA. Our method can be deployed in multi-class object detection applications, regardless of the image and object scales and orientations, making it a great choice for unconstrained aerial and satellite imagery.