 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeDrones4Good: Supporting Disaster Relief Through Remote Sensing and AI
Aug 09, 2023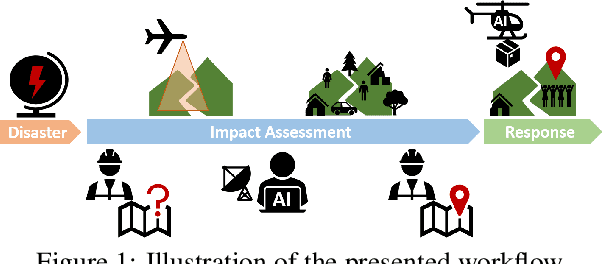

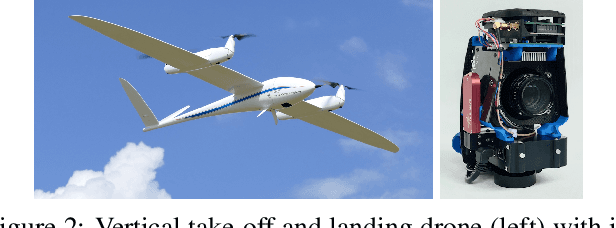

In order to respond effectively in the aftermath of a disaster, emergency services and relief organizations rely on timely and accurate information about the affected areas. Remote sensing has the potential to significantly reduce the time and effort required to collect such information by enabling a rapid survey of large areas. To achieve this, the main challenge is the automatic extraction of relevant information from remotely sensed data. In this work, we show how the combination of drone-based data with deep learning methods enables automated and large-scale situation assessment. In addition, we demonstrate the integration of onboard image processing techniques for the deployment of autonomous drone-based aid delivery. The results show the feasibility of a rapid and large-scale image analysis in the field, and that onboard image processing can increase the safety of drone-based aid deliveries.
SkyScapes -- Fine-Grained Semantic Understanding of Aerial Scenes
Jul 12, 2020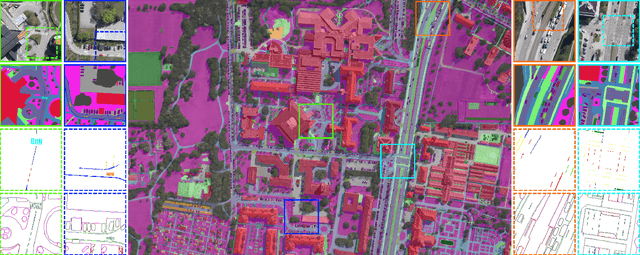
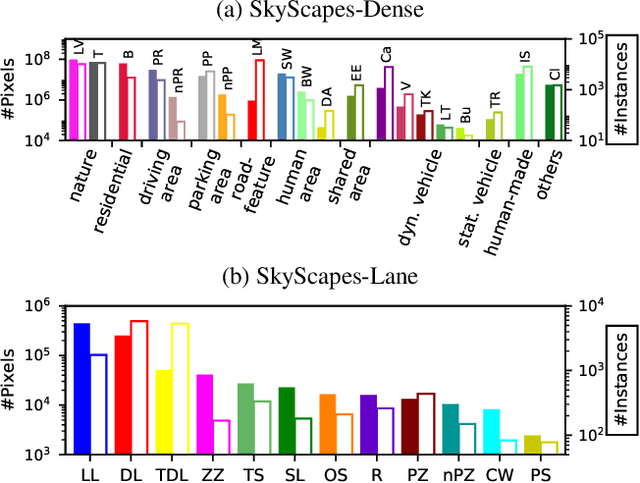
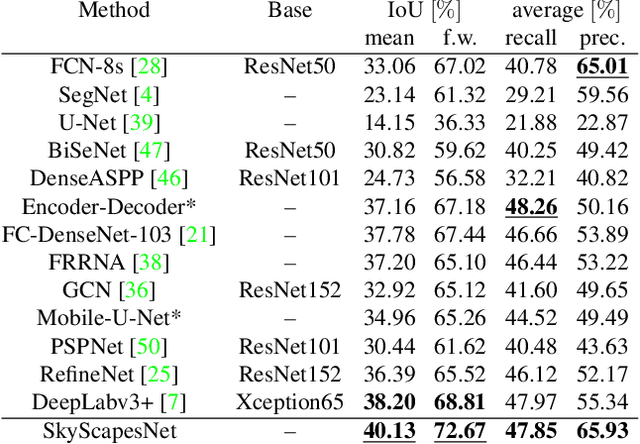
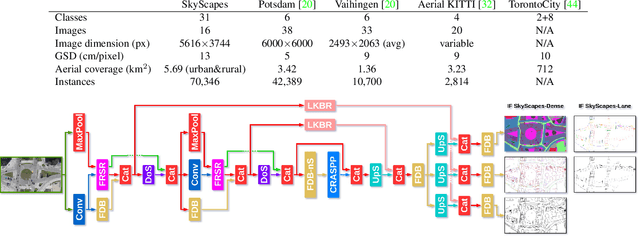
Understanding the complex urban infrastructure with centimeter-level accuracy is essential for many applications from autonomous driving to mapping, infrastructure monitoring, and urban management. Aerial images provide valuable information over a large area instantaneously; nevertheless, no current dataset captures the complexity of aerial scenes at the level of granularity required by real-world applications. To address this, we introduce SkyScapes, an aerial image dataset with highly-accurate, fine-grained annotations for pixel-level semantic labeling. SkyScapes provides annotations for 31 semantic categories ranging from large structures, such as buildings, roads and vegetation, to fine details, such as 12 (sub-)categories of lane markings. We have defined two main tasks on this dataset: dense semantic segmentation and multi-class lane-marking prediction. We carry out extensive experiments to evaluate state-of-the-art segmentation methods on SkyScapes. Existing methods struggle to deal with the wide range of classes, object sizes, scales, and fine details present. We therefore propose a novel multi-task model, which incorporates semantic edge detection and is better tuned for feature extraction from a wide range of scales. This model achieves notable improvements over the baselines in region outlines and level of detail on both tasks.
Road Segmentation in SAR Satellite Images with Deep Fully-Convolutional Neural Networks
Aug 16, 2018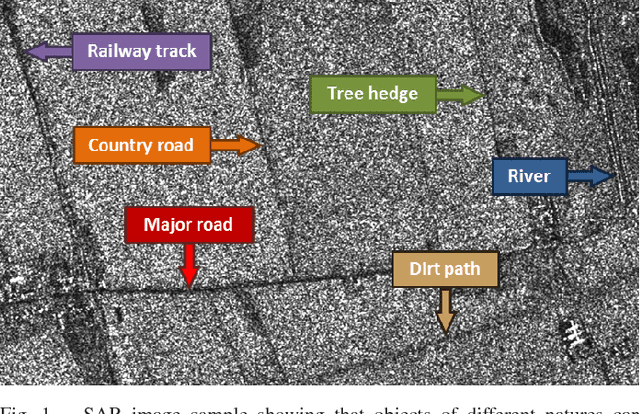

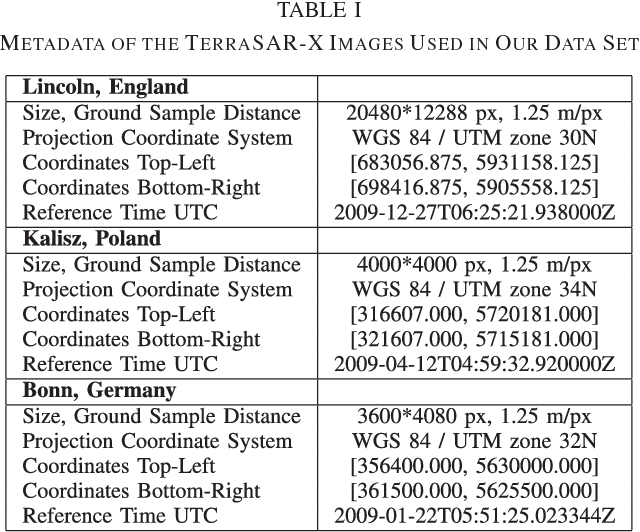
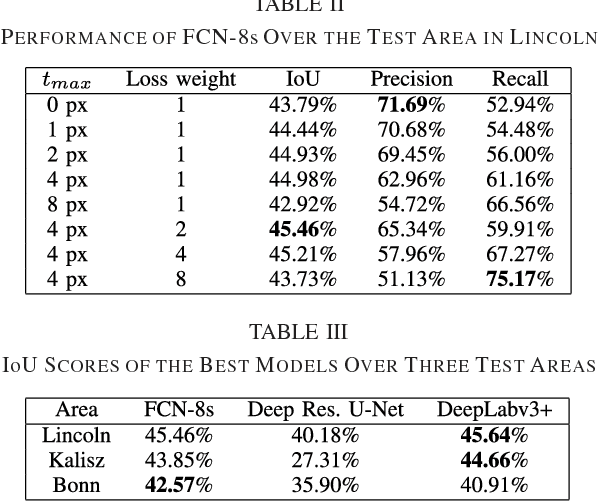
Remote sensing is extensively used in cartography. As transportation networks grow and change, extracting roads automatically from satellite images is crucial to keep maps up-to-date. Synthetic Aperture Radar satellites can provide high resolution topographical maps. However roads are difficult to identify in these data as they look visually similar to targets such as rivers and railways. Most road extraction methods on Synthetic Aperture Radar images still rely on a prior segmentation performed by classical computer vision algorithms. Few works study the potential of deep learning techniques, despite their successful applications to optical imagery. This letter presents an evaluation of Fully-Convolutional Neural Networks for road segmentation in SAR images. We study the relative performance of early and state-of-the-art networks after carefully enhancing their sensitivity towards thin objects by adding spatial tolerance rules. Our models shows promising results, successfully extracting most of the roads in our test dataset. This shows that, although Fully-Convolutional Neural Networks natively lack efficiency for road segmentation, they are capable of good results if properly tuned. As the segmentation quality does not scale well with the increasing depth of the networks, the design of specialized architectures for roads extraction should yield better performances.