 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeWide-Area Geolocalization with a Limited Field of View Camera in Challenging Urban Environments
Aug 14, 2023Cross-view geolocalization, a supplement or replacement for GPS, localizes an agent within a search area by matching ground-view images to overhead images. Significant progress has been made assuming a panoramic ground camera. Panoramic cameras' high complexity and cost make non-panoramic cameras more widely applicable, but also more challenging since they yield less scene overlap between ground and overhead images. This paper presents Restricted FOV Wide-Area Geolocalization (ReWAG), a cross-view geolocalization approach that combines a neural network and particle filter to globally localize a mobile agent with only odometry and a non-panoramic camera. ReWAG creates pose-aware embeddings and provides a strategy to incorporate particle pose into the Siamese network, improving localization accuracy by a factor of 100 compared to a vision transformer baseline. This extended work also presents ReWAG*, which improves upon ReWAG's generalization ability in previously unseen environments. ReWAG* repeatedly converges accurately on a dataset of images we have collected in Boston with a 72 degree field of view (FOV) camera, a location and FOV that ReWAG* was not trained on.
Wide-Area Geolocalization with a Limited Field of View Camera
Sep 23, 2022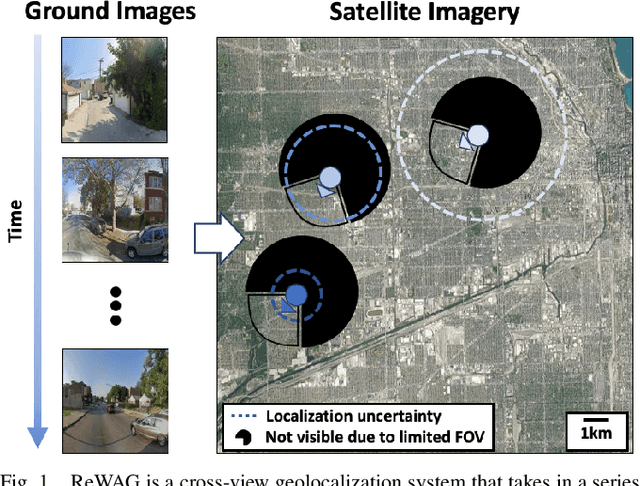
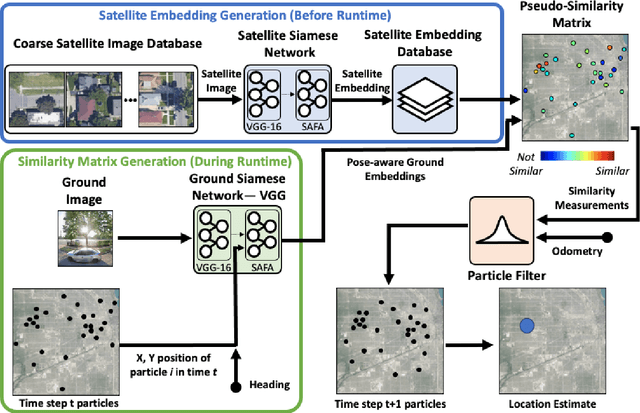
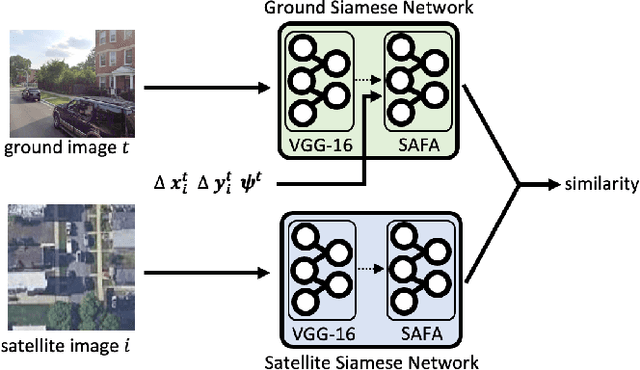
Cross-view geolocalization, a supplement or replacement for GPS, localizes an agent within a search area by matching images taken from a ground-view camera to overhead images taken from satellites or aircraft. Although the viewpoint disparity between ground and overhead images makes cross-view geolocalization challenging, significant progress has been made assuming that the ground agent has access to a panoramic camera. For example, our prior work (WAG) introduced changes in search area discretization, training loss, and particle filter weighting that enabled city-scale panoramic cross-view geolocalization. However, panoramic cameras are not widely used in existing robotic platforms due to their complexity and cost. Non-panoramic cross-view geolocalization is more applicable for robotics, but is also more challenging. This paper presents Restricted FOV Wide-Area Geolocalization (ReWAG), a cross-view geolocalization approach that generalizes WAG for use with standard, non-panoramic ground cameras by creating pose-aware embeddings and providing a strategy to incorporate particle pose into the Siamese network. ReWAG is a neural network and particle filter system that is able to globally localize a mobile agent in a GPS-denied environment with only odometry and a 90 degree FOV camera, achieving similar localization accuracy as what WAG achieved with a panoramic camera and improving localization accuracy by a factor of 100 compared to a baseline vision transformer (ViT) approach. A video highlight that demonstrates ReWAG's convergence on a test path of several dozen kilometers is available at https://youtu.be/U_OBQrt8qCE.
Multivariate Uncertainty in Deep Learning
Oct 31, 2019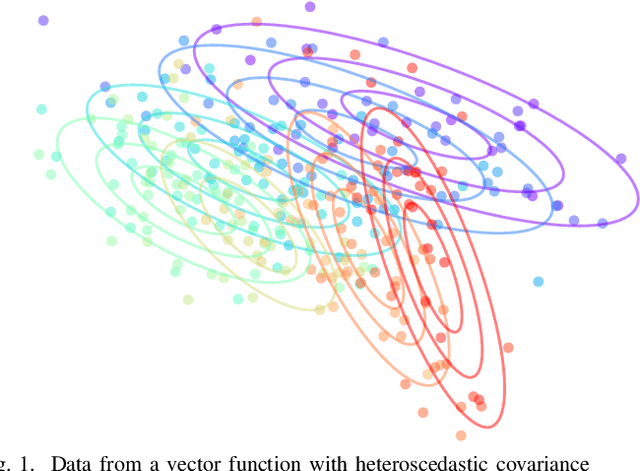


Deep learning is increasingly used for state estimation problems such as tracking, navigation, and pose estimation. The uncertainties associated with these measurements are typically assumed to be a fixed covariance matrix. For many scenarios this assumption is inaccurate, leading to worse subsequent filtered state estimates. We show how to model multivariate uncertainty for regression problems with neural networks, incorporating both aleatoric and epistemic sources of heteroscedastic uncertainty. We train a deep uncertainty covariance matrix model in two ways: directly using a multivariate Gaussian density loss function, and indirectly using end-to-end training through a Kalman filter. We experimentally show in a visual tracking problem the large impact that accurate multivariate uncertainty quantification can have on Kalman filter estimation for both in-domain and out-of-domain evaluation data.
A 3D Probabilistic Deep Learning System for Detection and Diagnosis of Lung Cancer Using Low-Dose CT Scans
Feb 08, 2019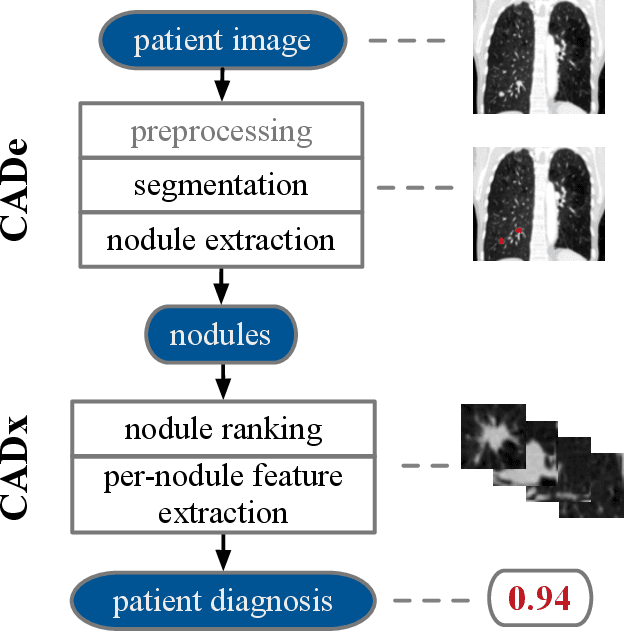
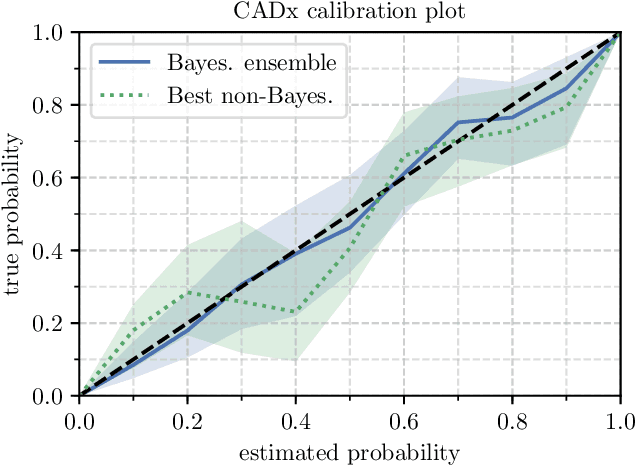
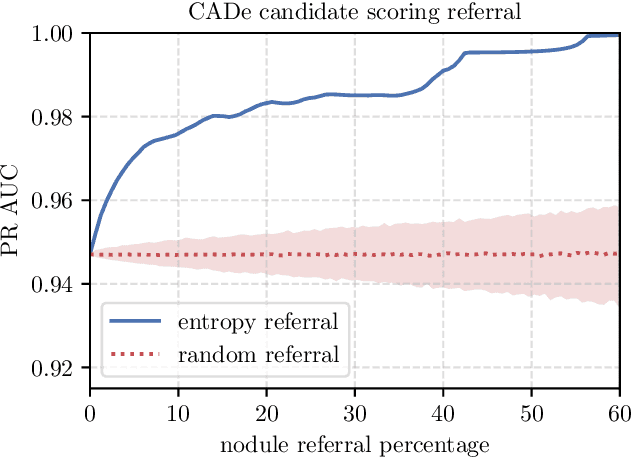
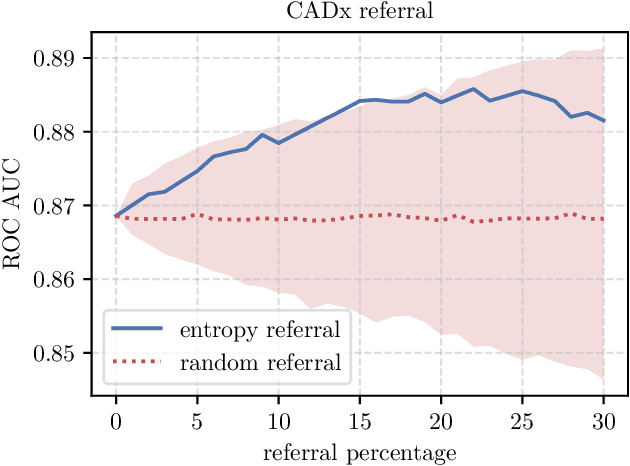
We introduce a new end-to-end computer aided detection and diagnosis system for lung cancer screening using low-dose CT scans. Our system is based on 3D convolutional neural networks and achieves state-of-the-art performance for both lung nodule detection and malignancy classification tasks on the publicly available LUNA16 and Kaggle Data Science Bowl challenges. Furthermore, we characterize model uncertainty in our system and show that we can use this to provide well-calibrated classification probabilities for nodule detection and patient malignancy diagnosis. To the best of our knowledge, model uncertainty has not been considered in the context of lung CT analysis before. These calibrated probabilities informed by model uncertainty can be used for subsequent risk-based decision making towards diagnostic interventions or disease treatments, as we demonstrate using a probability-based patient referral strategy to further improve our results.
Learning to Repair Software Vulnerabilities with Generative Adversarial Networks
Oct 28, 2018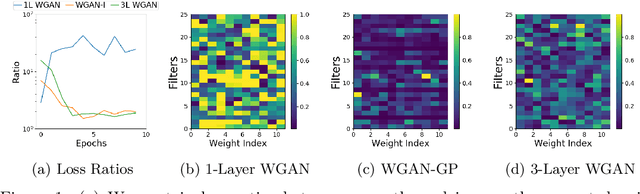
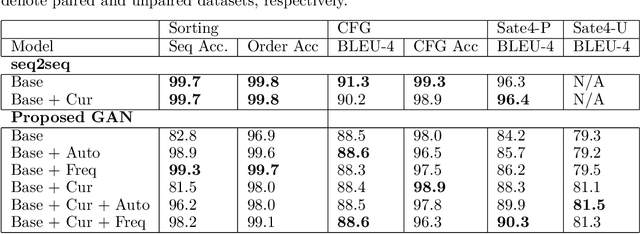
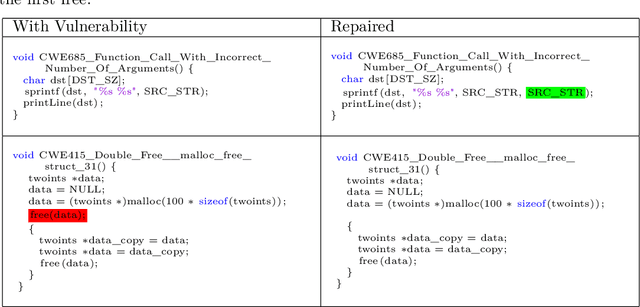
Motivated by the problem of automated repair of software vulnerabilities, we propose an adversarial learning approach that maps from one discrete source domain to another target domain without requiring paired labeled examples or source and target domains to be bijections. We demonstrate that the proposed adversarial learning approach is an effective technique for repairing software vulnerabilities, performing close to seq2seq approaches that require labeled pairs. The proposed Generative Adversarial Network approach is application-agnostic in that it can be applied to other problems similar to code repair, such as grammar correction or sentiment translation.
Automated software vulnerability detection with machine learning
Aug 02, 2018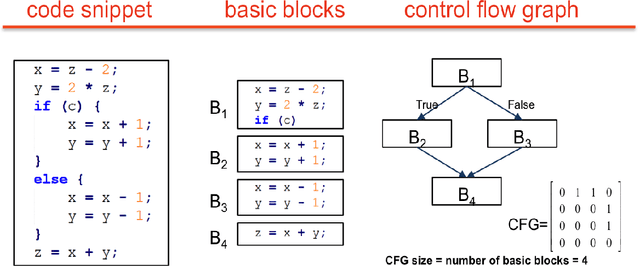
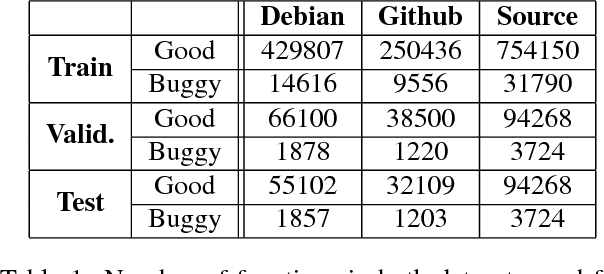
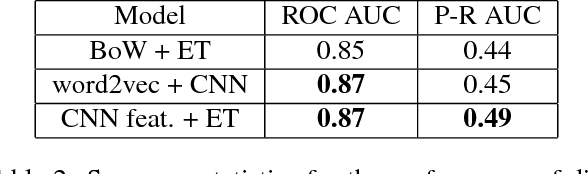
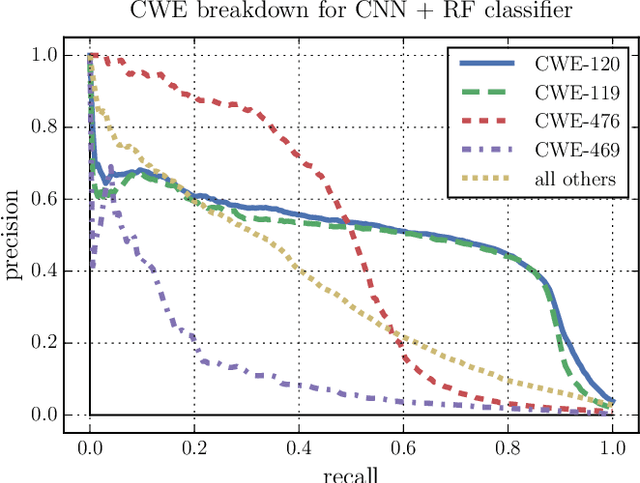
Thousands of security vulnerabilities are discovered in production software each year, either reported publicly to the Common Vulnerabilities and Exposures database or discovered internally in proprietary code. Vulnerabilities often manifest themselves in subtle ways that are not obvious to code reviewers or the developers themselves. With the wealth of open source code available for analysis, there is an opportunity to learn the patterns of bugs that can lead to security vulnerabilities directly from data. In this paper, we present a data-driven approach to vulnerability detection using machine learning, specifically applied to C and C++ programs. We first compile a large dataset of hundreds of thousands of open-source functions labeled with the outputs of a static analyzer. We then compare methods applied directly to source code with methods applied to artifacts extracted from the build process, finding that source-based models perform better. We also compare the application of deep neural network models with more traditional models such as random forests and find the best performance comes from combining features learned by deep models with tree-based models. Ultimately, our highest performing model achieves an area under the precision-recall curve of 0.49 and an area under the ROC curve of 0.87.
Automated Vulnerability Detection in Source Code Using Deep Representation Learning
Jul 11, 2018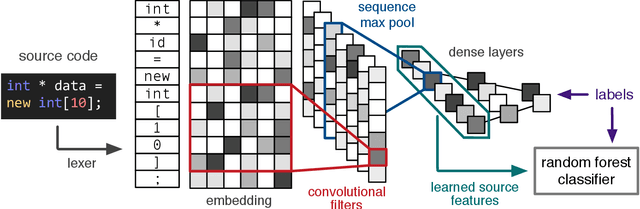
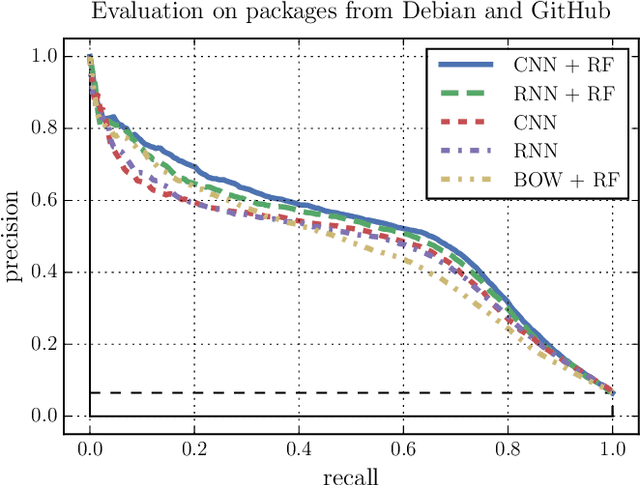
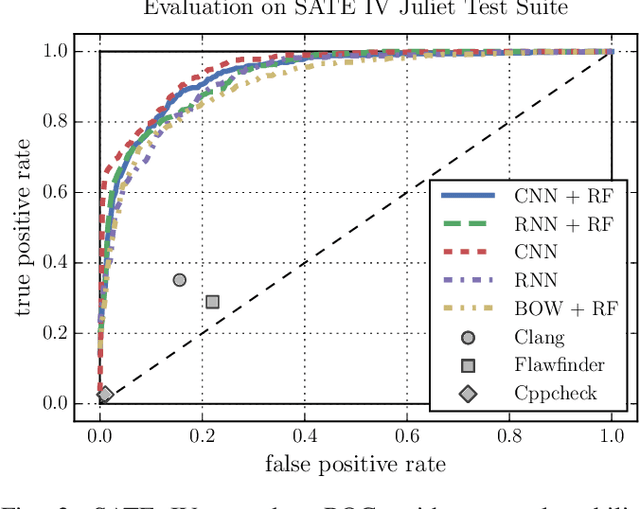
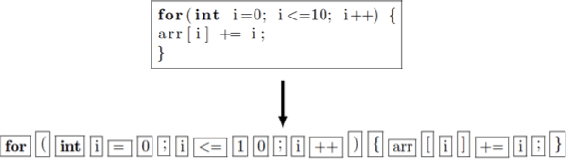
Increasing numbers of software vulnerabilities are discovered every year whether they are reported publicly or discovered internally in proprietary code. These vulnerabilities can pose serious risk of exploit and result in system compromise, information leaks, or denial of service. We leveraged the wealth of C and C++ open-source code available to develop a large-scale function-level vulnerability detection system using machine learning. To supplement existing labeled vulnerability datasets, we compiled a vast dataset of millions of open-source functions and labeled it with carefully-selected findings from three different static analyzers that indicate potential exploits. Using these datasets, we developed a fast and scalable vulnerability detection tool based on deep feature representation learning that directly interprets lexed source code. We evaluated our tool on code from both real software packages and the NIST SATE IV benchmark dataset. Our results demonstrate that deep feature representation learning on source code is a promising approach for automated software vulnerability detection.