 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeWide-Area Geolocalization with a Limited Field of View Camera in Challenging Urban Environments
Aug 14, 2023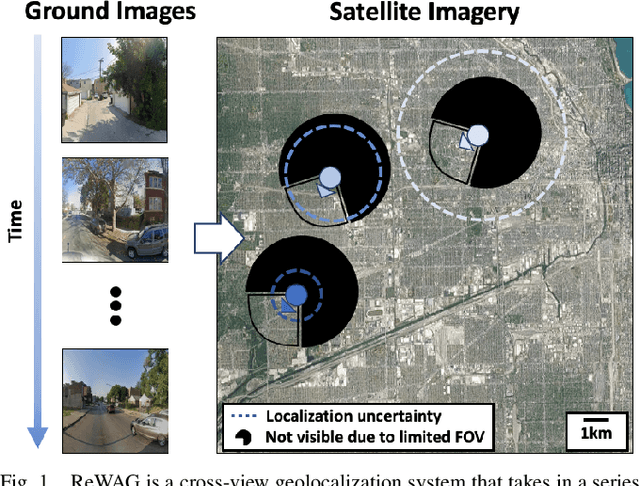
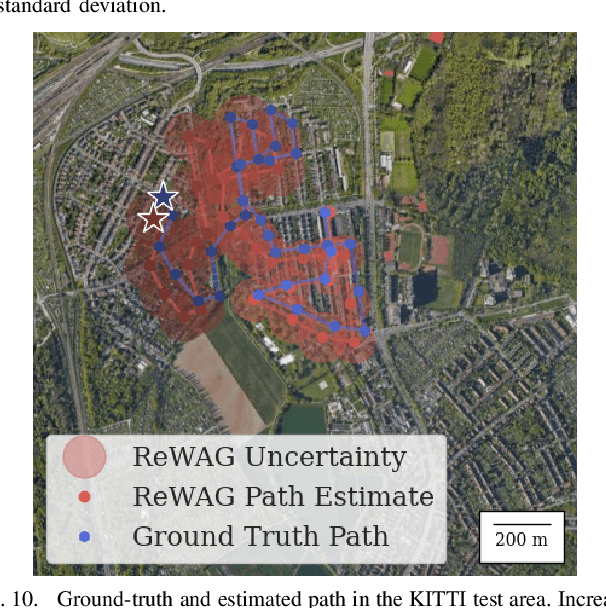
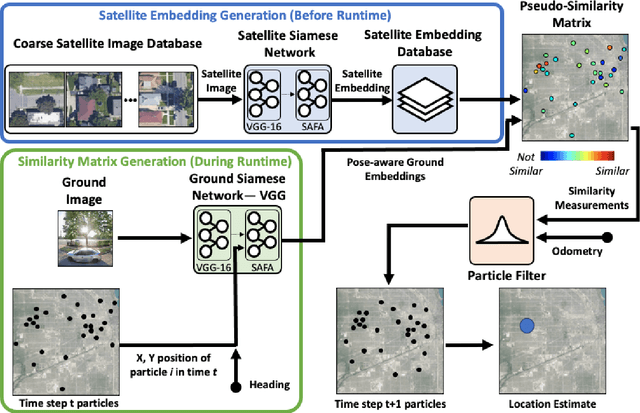
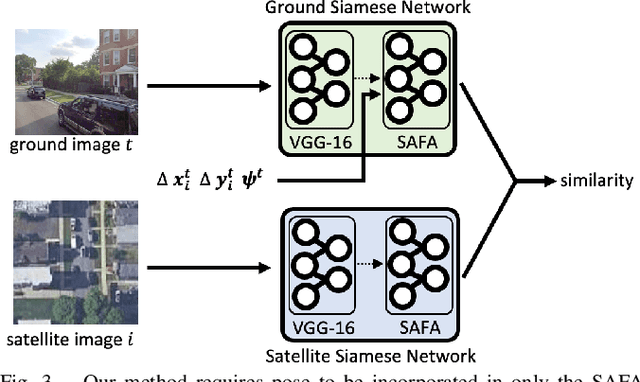
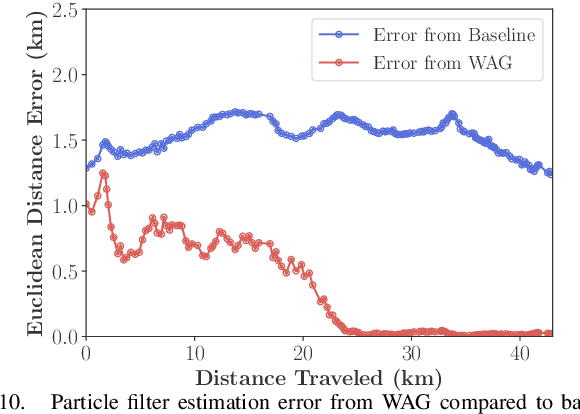
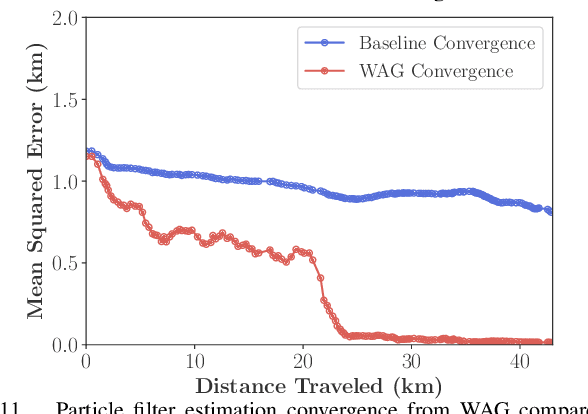
Cross-view geolocalization, a supplement or replacement for GPS, localizes an agent within a search area by matching ground-view images to overhead images. Significant progress has been made assuming a panoramic ground camera. Panoramic cameras' high complexity and cost make non-panoramic cameras more widely applicable, but also more challenging since they yield less scene overlap between ground and overhead images. This paper presents Restricted FOV Wide-Area Geolocalization (ReWAG), a cross-view geolocalization approach that combines a neural network and particle filter to globally localize a mobile agent with only odometry and a non-panoramic camera. ReWAG creates pose-aware embeddings and provides a strategy to incorporate particle pose into the Siamese network, improving localization accuracy by a factor of 100 compared to a vision transformer baseline. This extended work also presents ReWAG*, which improves upon ReWAG's generalization ability in previously unseen environments. ReWAG* repeatedly converges accurately on a dataset of images we have collected in Boston with a 72 degree field of view (FOV) camera, a location and FOV that ReWAG* was not trained on.
Wide-Area Geolocalization with a Limited Field of View Camera
Sep 23, 2022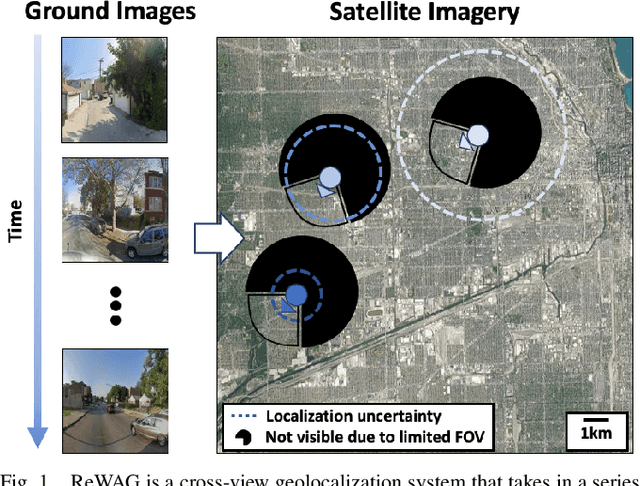
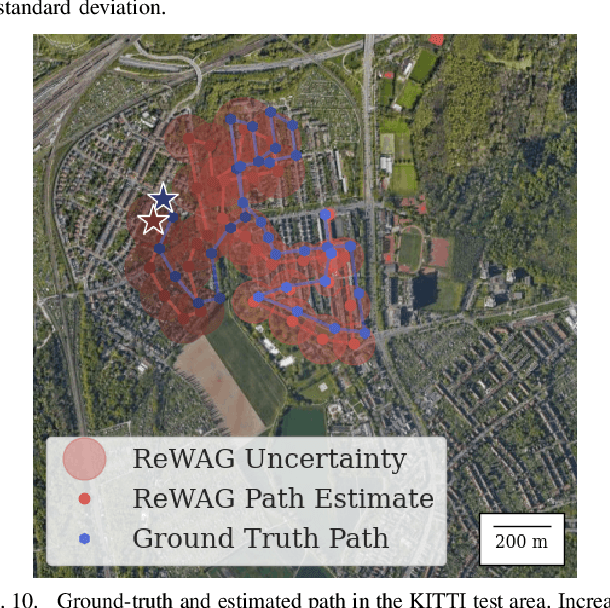
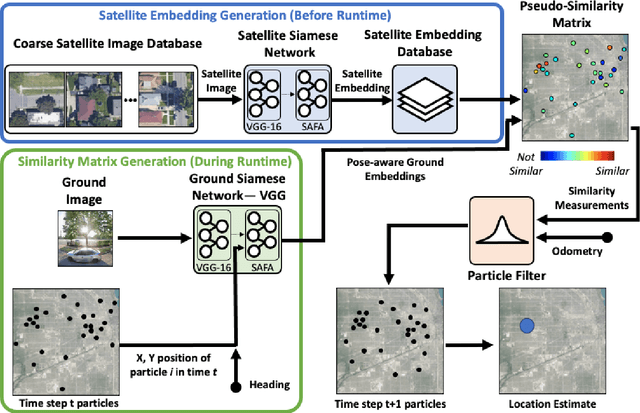
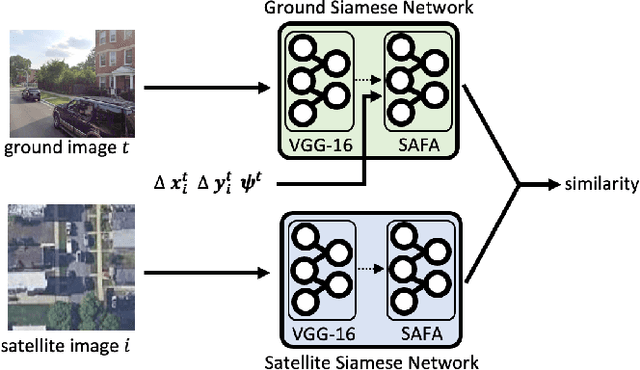
Cross-view geolocalization, a supplement or replacement for GPS, localizes an agent within a search area by matching images taken from a ground-view camera to overhead images taken from satellites or aircraft. Although the viewpoint disparity between ground and overhead images makes cross-view geolocalization challenging, significant progress has been made assuming that the ground agent has access to a panoramic camera. For example, our prior work (WAG) introduced changes in search area discretization, training loss, and particle filter weighting that enabled city-scale panoramic cross-view geolocalization. However, panoramic cameras are not widely used in existing robotic platforms due to their complexity and cost. Non-panoramic cross-view geolocalization is more applicable for robotics, but is also more challenging. This paper presents Restricted FOV Wide-Area Geolocalization (ReWAG), a cross-view geolocalization approach that generalizes WAG for use with standard, non-panoramic ground cameras by creating pose-aware embeddings and providing a strategy to incorporate particle pose into the Siamese network. ReWAG is a neural network and particle filter system that is able to globally localize a mobile agent in a GPS-denied environment with only odometry and a 90 degree FOV camera, achieving similar localization accuracy as what WAG achieved with a panoramic camera and improving localization accuracy by a factor of 100 compared to a baseline vision transformer (ViT) approach. A video highlight that demonstrates ReWAG's convergence on a test path of several dozen kilometers is available at https://youtu.be/U_OBQrt8qCE.
City-wide Street-to-Satellite Image Geolocalization of a Mobile Ground Agent
Mar 10, 2022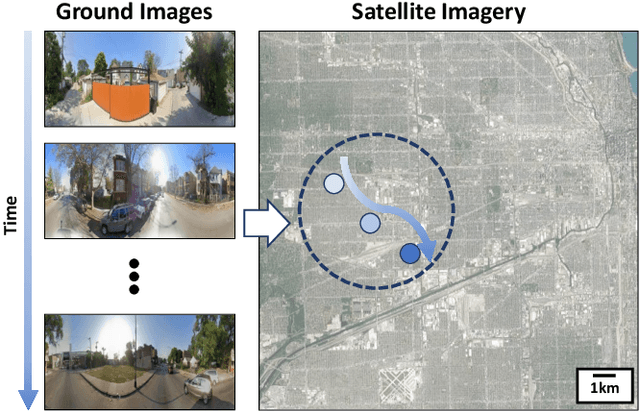
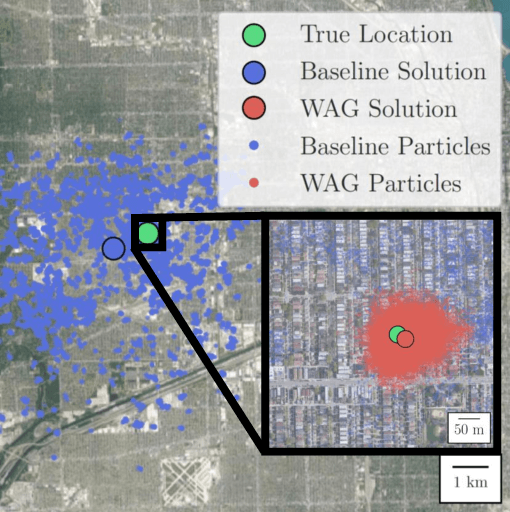
Cross-view image geolocalization provides an estimate of an agent's global position by matching a local ground image to an overhead satellite image without the need for GPS. It is challenging to reliably match a ground image to the correct satellite image since the images have significant viewpoint differences. Existing works have demonstrated localization in constrained scenarios over small areas but have not demonstrated wider-scale localization. Our approach, called Wide-Area Geolocalization (WAG), combines a neural network with a particle filter to achieve global position estimates for agents moving in GPS-denied environments, scaling efficiently to city-scale regions. WAG introduces a trinomial loss function for a Siamese network to robustly match non-centered image pairs and thus enables the generation of a smaller satellite image database by coarsely discretizing the search area. A modified particle filter weighting scheme is also presented to improve localization accuracy and convergence. Taken together, WAG's network training and particle filter weighting approach achieves city-scale position estimation accuracies on the order of 20 meters, a 98% reduction compared to a baseline training and weighting approach. Applied to a smaller-scale testing area, WAG reduces the final position estimation error by 64% compared to a state-of-the-art baseline from the literature. WAG's search space discretization additionally significantly reduces storage and processing requirements.
Lunar Terrain Relative Navigation Using a Convolutional Neural Network for Visual Crater Detection
Jul 15, 2020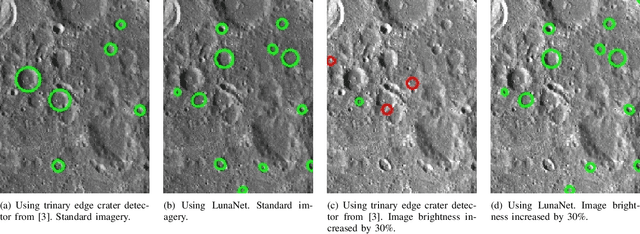
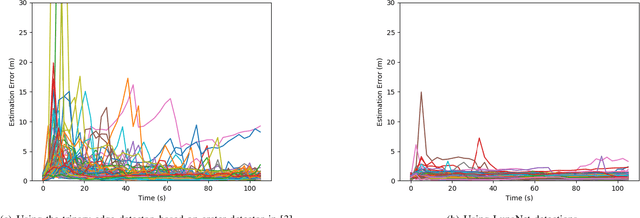
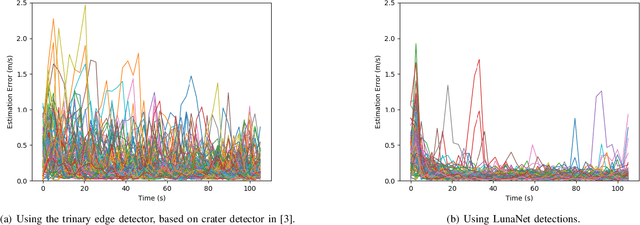
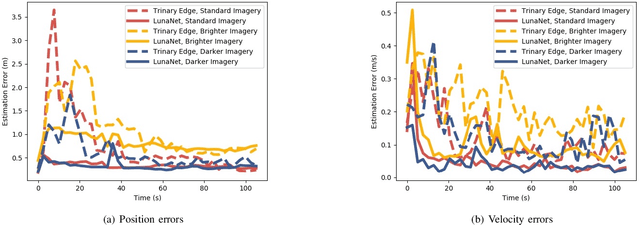
Terrain relative navigation can improve the precision of a spacecraft's position estimate by detecting global features that act as supplementary measurements to correct for drift in the inertial navigation system. This paper presents a system that uses a convolutional neural network (CNN) and image processing methods to track the location of a simulated spacecraft with an extended Kalman filter (EKF). The CNN, called LunaNet, visually detects craters in the simulated camera frame and those detections are matched to known lunar craters in the region of the current estimated spacecraft position. These matched craters are treated as features that are tracked using the EKF. LunaNet enables more reliable position tracking over a simulated trajectory due to its greater robustness to changes in image brightness and more repeatable crater detections from frame to frame throughout a trajectory. LunaNet combined with an EKF produces a decrease of 60% in the average final position estimation error and a decrease of 25% in average final velocity estimation error compared to an EKF using an image processing-based crater detection method when tested on trajectories using images of standard brightness.