 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeAdvantages of Multimodal versus Verbal-Only Robot-to-Human Communication with an Anthropomorphic Robotic Mock Driver
Jul 03, 2023



Robots are increasingly used in shared environments with humans, making effective communication a necessity for successful human-robot interaction. In our work, we study a crucial component: active communication of robot intent. Here, we present an anthropomorphic solution where a humanoid robot communicates the intent of its host robot acting as an "Anthropomorphic Robotic Mock Driver" (ARMoD). We evaluate this approach in two experiments in which participants work alongside a mobile robot on various tasks, while the ARMoD communicates a need for human attention, when required, or gives instructions to collaborate on a joint task. The experiments feature two interaction styles of the ARMoD: a verbal-only mode using only speech and a multimodal mode, additionally including robotic gaze and pointing gestures to support communication and register intent in space. Our results show that the multimodal interaction style, including head movements and eye gaze as well as pointing gestures, leads to more natural fixation behavior. Participants naturally identified and fixated longer on the areas relevant for intent communication, and reacted faster to instructions in collaborative tasks. Our research further indicates that the ARMoD intent communication improves engagement and social interaction with mobile robots in workplace settings.
The Effect of Anthropomorphism on Trust in an Industrial Human-Robot Interaction
Sep 01, 2022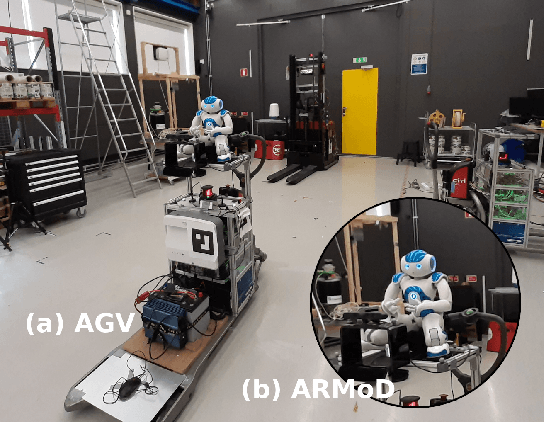
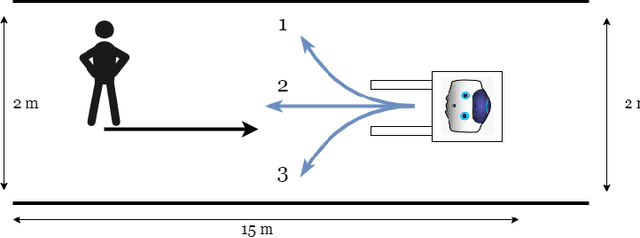
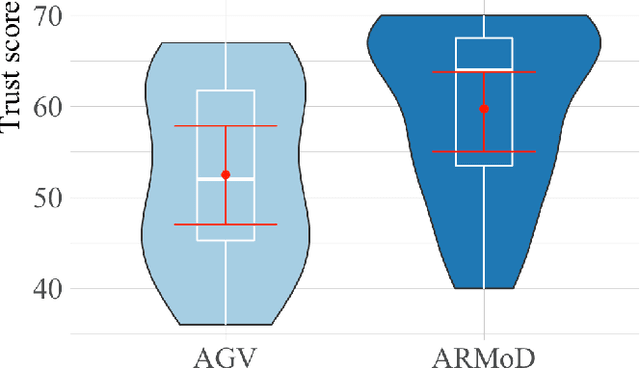

Robots are increasingly deployed in spaces shared with humans, including home settings and industrial environments. In these environments, the interaction between humans and robots (HRI) is crucial for safety, legibility, and efficiency. A key factor in HRI is trust, which modulates the acceptance of the system. Anthropomorphism has been shown to modulate trust development in a robot, but robots in industrial environments are not usually anthropomorphic. We designed a simple interaction in an industrial environment in which an anthropomorphic mock driver (ARMoD) robot simulates to drive an autonomous guided vehicle (AGV). The task consisted of a human crossing paths with the AGV, with or without the ARMoD mounted on the top, in a narrow corridor. The human and the system needed to negotiate trajectories when crossing paths, meaning that the human had to attend to the trajectory of the robot to avoid a collision with it. There was a significant increment in the reported trust scores in the condition where the ARMoD was present, showing that the presence of an anthropomorphic robot is enough to modulate the trust, even in limited interactions as the one we present here.
THÖR: Human-Robot Indoor Navigation Experiment and Accurate Motion Trajectories Dataset
Sep 10, 2019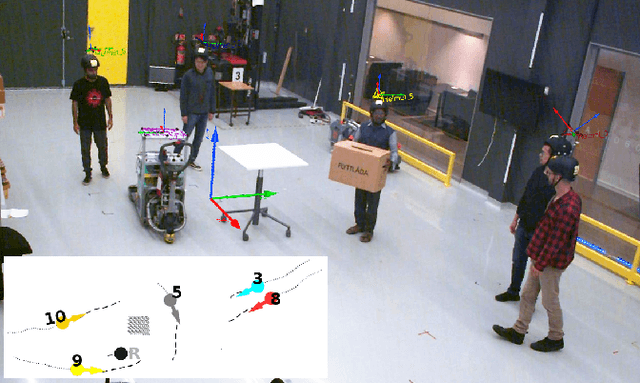
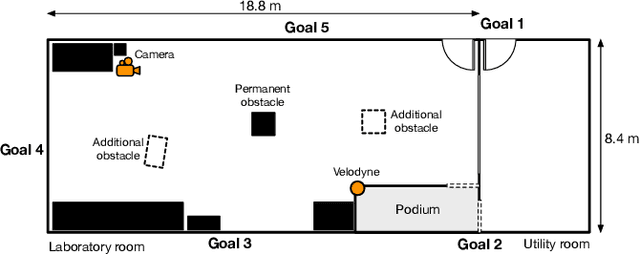
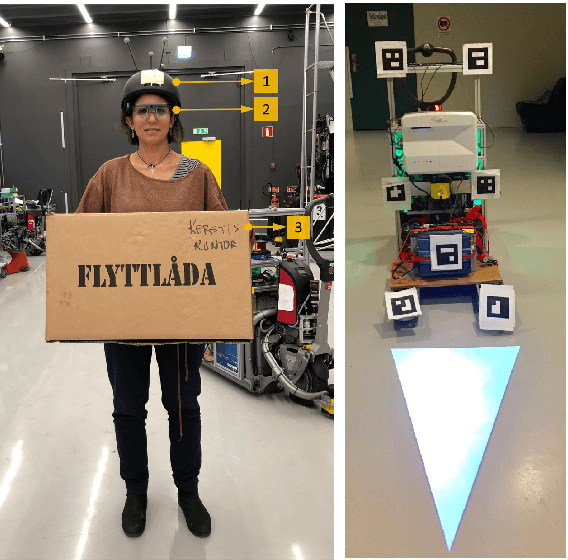
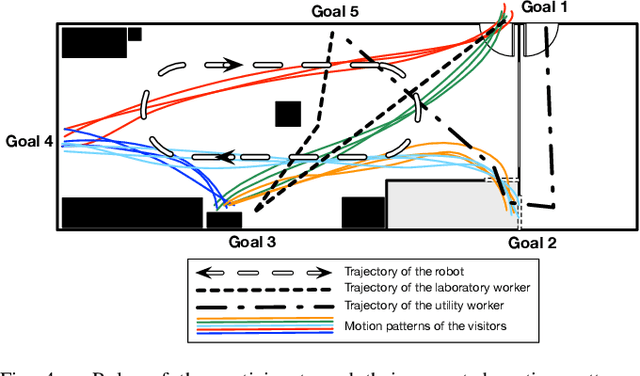
Understanding human behavior is key for robots and intelligent systems that share a space with people. Accordingly, research that enables such systems to perceive, track, learn and predict human behavior as well as to plan and interact with humans has received increasing attention over the last years. The availability of large human motion datasets that contain relevant levels of difficulty is fundamental to this research. Existing datasets are often limited in terms of information content, annotation quality or variability of human behavior. In this paper, we present TH\"OR, a new dataset with human motion trajectory and eye gaze data collected in an indoor environment with accurate ground truth for position, head orientation, gaze direction, social grouping, obstacles map and goal coordinates. TH\"OR also contains sensor data collected by a 3D lidar and involves a mobile robot navigating the space. We propose a set of metrics to quantitatively analyze motion trajectory datasets such as the average tracking duration, ground truth noise, curvature and speed variation of the trajectories. In comparison to prior art, our dataset has a larger variety in human motion behavior, is less noisy, and contains annotations at higher frequencies.