 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeA Federated Reinforcement Learning Framework for Link Activation in Multi-link Wi-Fi Networks
Apr 28, 2023



Next-generation Wi-Fi networks are looking forward to introducing new features like multi-link operation (MLO) to both achieve higher throughput and lower latency. However, given the limited number of available channels, the use of multiple links by a group of contending Basic Service Sets (BSSs) can result in higher interference and channel contention, thus potentially leading to lower performance and reliability. In such a situation, it could be better for all contending BSSs to use less links if that contributes to reduce channel access contention. Recently, reinforcement learning (RL) has proven its potential for optimizing resource allocation in wireless networks. However, the independent operation of each wireless network makes difficult -- if not almost impossible -- for each individual network to learn a good configuration. To solve this issue, in this paper, we propose the use of a Federated Reinforcement Learning (FRL) framework, i.e., a collaborative machine learning approach to train models across multiple distributed agents without exchanging data, to collaboratively learn the the best MLO-Link Allocation (LA) strategy by a group of neighboring BSSs. The simulation results show that the FRL-based decentralized MLO-LA strategy achieves a better throughput fairness, and so a higher reliability -- because it allows the different BSSs to find a link allocation strategy which maximizes the minimum achieved data rate -- compared to fixed, random and RL-based MLO-LA schemes.
Automatic Number Plate Recognition using Random Forest Classifier
Mar 26, 2023Automatic Number Plate Recognition System (ANPRS) is a mass surveillance embedded system that recognizes the number plate of the vehicle. This system is generally used for traffic management applications. It should be very efficient in detecting the number plate in noisy as well as in low illumination and also within required time frame. This paper proposes a number plate recognition method by processing vehicle's rear or front image. After image is captured, processing is divided into four steps which are Pre-Processing, Number plate localization, Character segmentation and Character recognition. Pre-Processing enhances the image for further processing, number plate localization extracts the number plate region from the image, character segmentation separates the individual characters from the extracted number plate and character recognition identifies the optical characters by using random forest classification algorithm. Experimental results reveal that the accuracy of this method is 90.9%.
An Improved Positioning Accuracy Method of a Robot Based on Particle Filter
Oct 27, 2021This paper aims to improve the performance and positioning accuracy of a robot by using the particle filter method. The laser range information is a wireless navigation system mainly used to measure, position, and control autonomous robots. Its localization is more flexible to control than wired guidance systems. However, the navigation through the laser range finder occurs with a large positioning error while it moves or turns fast. For solving this problem, the paper proposes a method to improve the positioning accuracy of a robot in an indoor environment by using a particle filter with robust characteristics in a nonlinear or non-Gaussian system. In this experiment, a robot is equipped with a laser range finder, two encoders, and a gyro for navigation to verify the positioning accuracy and performance. The positioning accuracy and performance could improve by approximately 85.5% in this proposed method.
Cost-effective Mapping of Mobile Robot Based on the Fusion of UWB and Short-range 2D LiDAR
Jun 07, 2021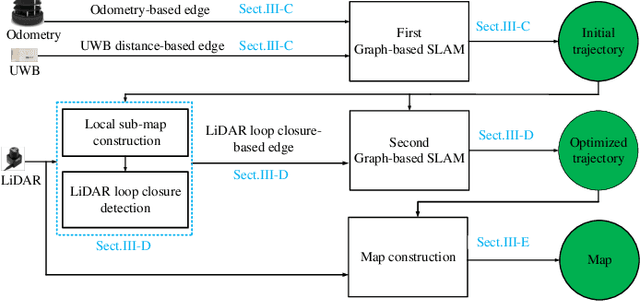
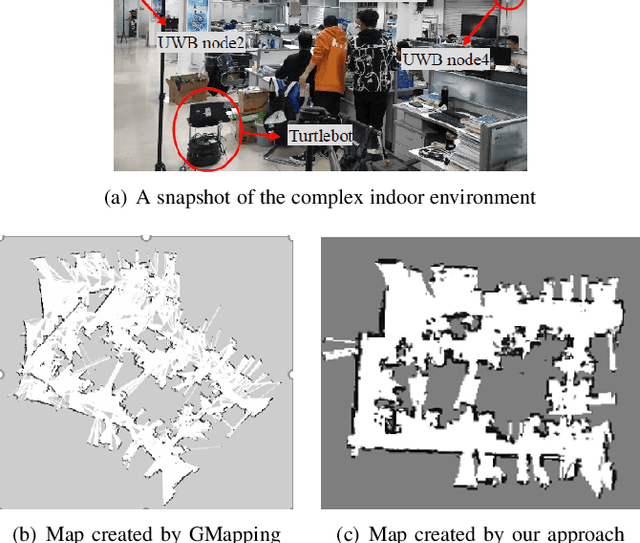
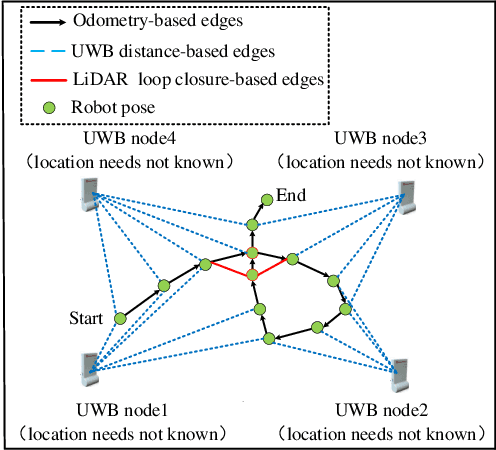

Environment mapping is an essential prerequisite for mobile robots to perform different tasks such as navigation and mission planning. With the availability of low-cost 2D LiDARs, there are increasing applications of such 2D LiDARs in industrial environments. However, environment mapping in an unknown and feature-less environment with such low-cost 2D LiDARs remains a challenge. The challenge mainly originates from the short-range of LiDARs and complexities in performing scan matching in these environments. In order to resolve these shortcomings, we propose to fuse the ultra-wideband (UWB) with 2D LiDARs to improve the mapping quality of a mobile robot. The optimization-based approach is utilized for the fusion of UWB ranging information and odometry to first optimize the trajectory. Then the LiDAR-based loop closures are incorporated to improve the accuracy of the trajectory estimation. Finally, the optimized trajectory is combined with the LiDAR scans to produce the occupancy map of the environment. The performance of the proposed approach is evaluated in an indoor feature-less environment with a size of 20m*20m. Obtained results show that the mapping error of the proposed scheme is 85.5% less than that of the conventional GMapping algorithm with short-range LiDAR (for example Hokuyo URG-04LX in our experiment with a maximum range of 5.6m).
Can we aggregate human intelligence? an approach for human centric aggregation using ordered weighted averaging operators
May 01, 2021
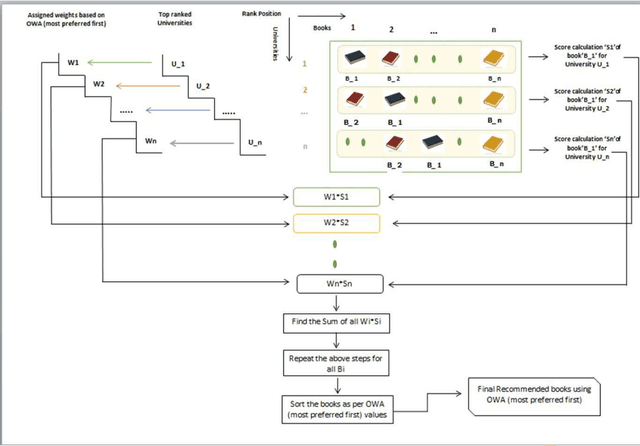
The primary objective of this paper is to present an approach for recommender systems that can assimilate ranking to the voters or rankers so that recommendation can be made by giving priority to experts suggestion over usual recommendation. To accomplish this, we have incorporated the concept of human-centric aggregation via Ordered Weighted Aggregation (OWA). Here, we are advocating ranked recommendation where rankers are assigned weights according to their place in the ranking. Further, the recommendation process which is presented here for the recommendation of books to university students exploits linguistic data summaries and Ordered Weighted Aggregation (OWA) technique. In the suggested approach, the weights are assigned in a way that it associates higher weights to best ranked university. The approach has been evaluated over eight different parameters. The superiority of the proposed approach is evident from the evaluation results. We claim that proposed scheme saves storage spaces required in traditional recommender systems as well as it does not need users prior preferences and hence produce a solution for cold start problem. This envisaged that the proposed scheme can be very useful in decision making problems, especially for recommender systems. In addition, it emphasizes on how human-centric aggregation can be useful in recommendation researches, and also it gives a new direction about how various human specific tasks can be numerically aggregated.