 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeCost-effective Mapping of Mobile Robot Based on the Fusion of UWB and Short-range 2D LiDAR
Paper and Code
Jun 07, 2021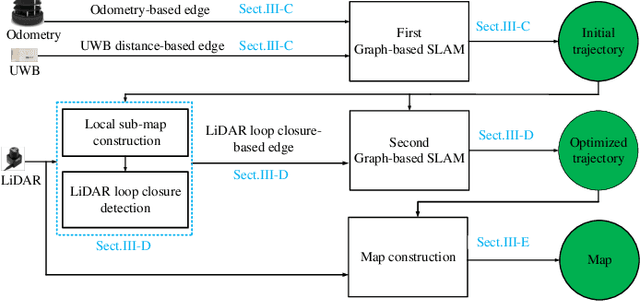
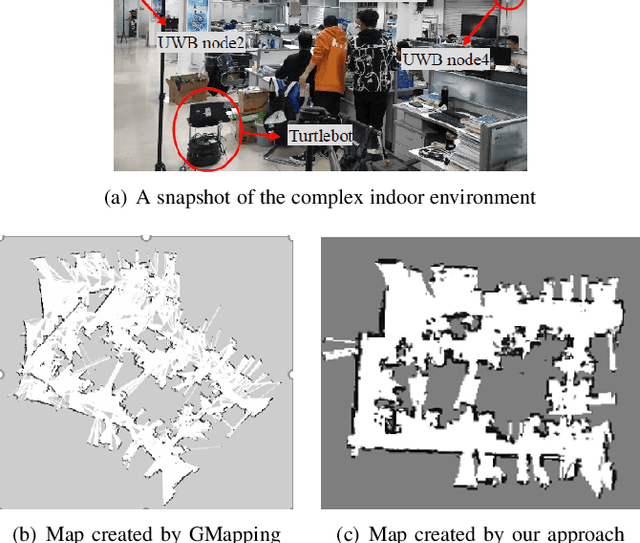
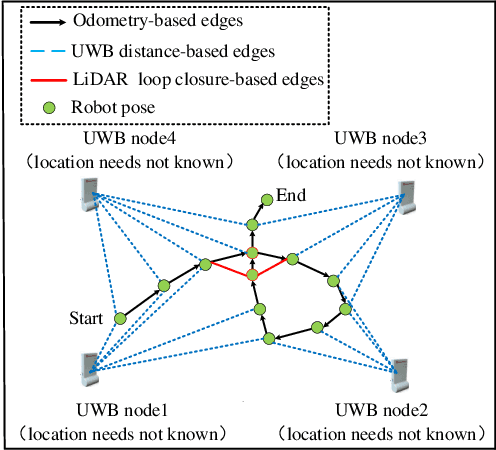

Environment mapping is an essential prerequisite for mobile robots to perform different tasks such as navigation and mission planning. With the availability of low-cost 2D LiDARs, there are increasing applications of such 2D LiDARs in industrial environments. However, environment mapping in an unknown and feature-less environment with such low-cost 2D LiDARs remains a challenge. The challenge mainly originates from the short-range of LiDARs and complexities in performing scan matching in these environments. In order to resolve these shortcomings, we propose to fuse the ultra-wideband (UWB) with 2D LiDARs to improve the mapping quality of a mobile robot. The optimization-based approach is utilized for the fusion of UWB ranging information and odometry to first optimize the trajectory. Then the LiDAR-based loop closures are incorporated to improve the accuracy of the trajectory estimation. Finally, the optimized trajectory is combined with the LiDAR scans to produce the occupancy map of the environment. The performance of the proposed approach is evaluated in an indoor feature-less environment with a size of 20m*20m. Obtained results show that the mapping error of the proposed scheme is 85.5% less than that of the conventional GMapping algorithm with short-range LiDAR (for example Hokuyo URG-04LX in our experiment with a maximum range of 5.6m).