 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeXLDA: Linear Discriminant Analysis for Scaling Continual Learning to Extreme Classification at the Edge
Jul 21, 2023Streaming Linear Discriminant Analysis (LDA) while proven in Class-incremental Learning deployments at the edge with limited classes (upto 1000), has not been proven for deployment in extreme classification scenarios. In this paper, we present: (a) XLDA, a framework for Class-IL in edge deployment where LDA classifier is proven to be equivalent to FC layer including in extreme classification scenarios, and (b) optimizations to enable XLDA-based training and inference for edge deployment where there is a constraint on available compute resources. We show up to 42x speed up using a batched training approach and up to 5x inference speedup with nearest neighbor search on extreme datasets like AliProducts (50k classes) and Google Landmarks V2 (81k classes)
Communication Optimization in Large Scale Federated Learning using Autoencoder Compressed Weight Updates
Aug 12, 2021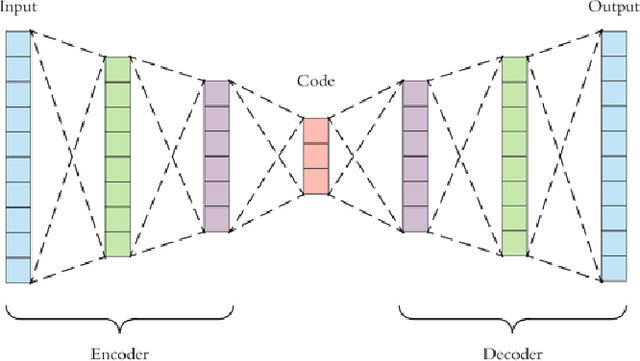
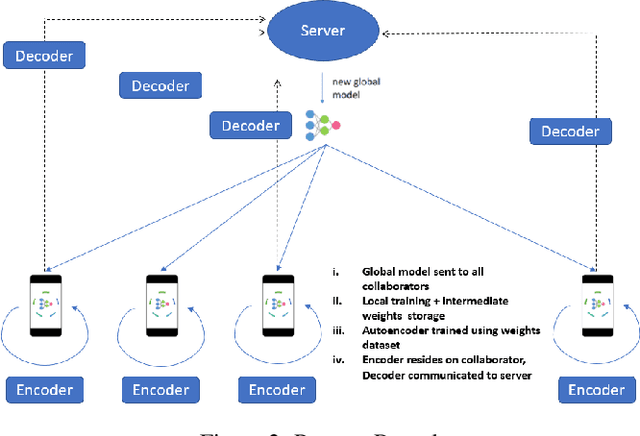
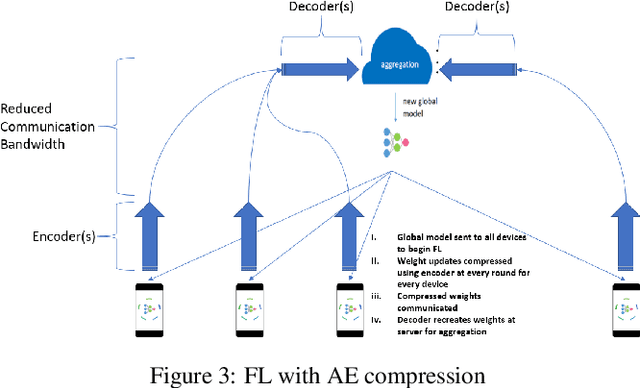

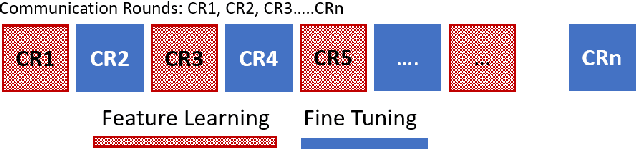
Federated Learning (FL) solves many of this decade's concerns regarding data privacy and computation challenges. FL ensures no data leaves its source as the model is trained at where the data resides. However, FL comes with its own set of challenges. The communication of model weight updates in this distributed environment comes with significant network bandwidth costs. In this context, we propose a mechanism of compressing the weight updates using Autoencoders (AE), which learn the data features of the weight updates and subsequently perform compression. The encoder is set up on each of the nodes where the training is performed while the decoder is set up on the node where the weights are aggregated. This setup achieves compression through the encoder and recreates the weights at the end of every communication round using the decoder. This paper shows that the dynamic and orthogonal AE based weight compression technique could serve as an advantageous alternative (or an add-on) in a large scale FL, as it not only achieves compression ratios ranging from 500x to 1720x and beyond, but can also be modified based on the accuracy requirements, computational capacity, and other requirements of the given FL setup.
Distributed Planning for Serving Cooperative Tasks with Time Windows: A Game Theoretic Approach
Jul 18, 2021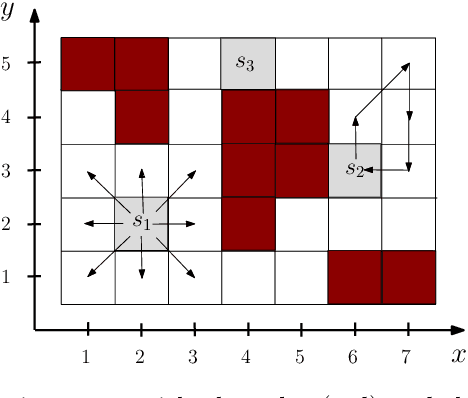
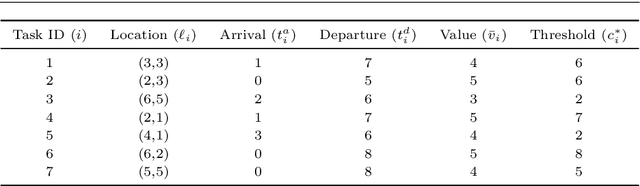
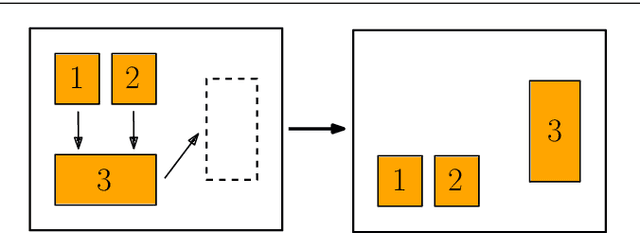
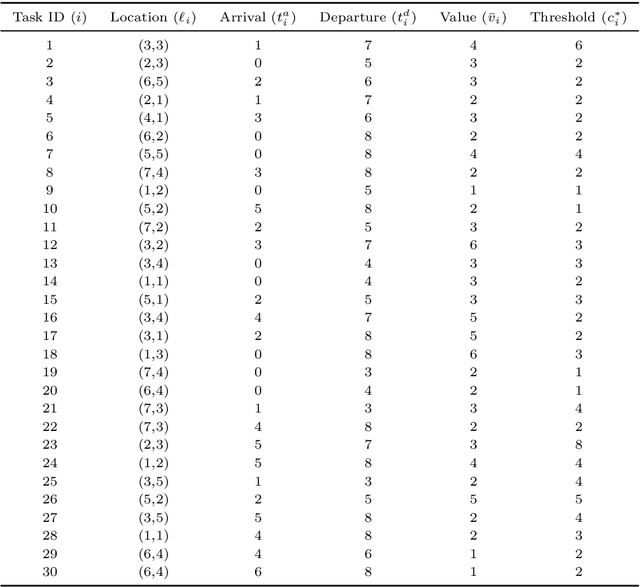
We study distributed planning for multi-robot systems to provide optimal service to cooperative tasks that are distributed over space and time. Each task requires service by sufficiently many robots at the specified location within the specified time window. Tasks arrive over episodes and the robots try to maximize the total value of service in each episode by planning their own trajectories based on the specifications of incoming tasks. Robots are required to start and end each episode at their assigned stations in the environment. We present a game theoretic solution to this problem by mapping it to a game, where the action of each robot is its trajectory in an episode, and using a suitable learning algorithm to obtain optimal joint plans in a distributed manner. We present a systematic way to design minimal action sets (subsets of feasible trajectories) for robots based on the specifications of incoming tasks to facilitate fast learning. We then provide the performance guarantees for the cases where all the robots follow a best response or noisy best response algorithm to iteratively plan their trajectories. While the best response algorithm leads to a Nash equilibrium, the noisy best response algorithm leads to globally optimal joint plans with high probability. We show that the proposed game can in general have arbitrarily poor Nash equilibria, which makes the noisy best response algorithm preferable unless the task specifications are known to have some special structure. We also describe a family of special cases where all the equilibria are guaranteed to have bounded suboptimality. Simulations and experimental results are provided to demonstrate the proposed approach.
Weight Divergence Driven Divide-and-Conquer Approach for Optimal Federated Learning from non-IID Data
Jun 30, 2021

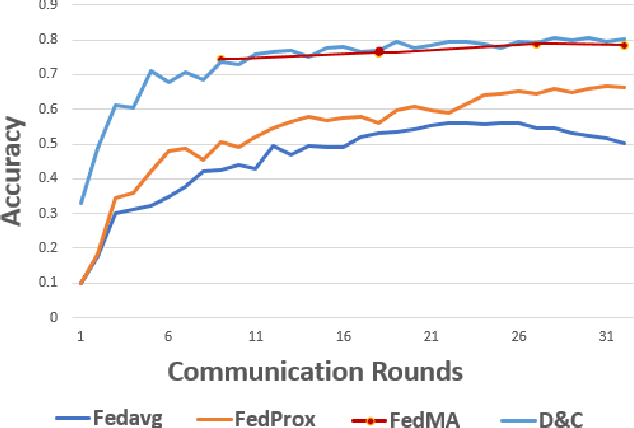
Federated Learning allows training of data stored in distributed devices without the need for centralizing training data, thereby maintaining data privacy. Addressing the ability to handle data heterogeneity (non-identical and independent distribution or non-IID) is a key enabler for the wider deployment of Federated Learning. In this paper, we propose a novel Divide-and-Conquer training methodology that enables the use of the popular FedAvg aggregation algorithm by overcoming the acknowledged FedAvg limitations in non-IID environments. We propose a novel use of Cosine-distance based Weight Divergence metric to determine the exact point where a Deep Learning network can be divided into class agnostic initial layers and class-specific deep layers for performing a Divide and Conquer training. We show that the methodology achieves trained model accuracy at par (and in certain cases exceeding) with numbers achieved by state-of-the-art Aggregation algorithms like FedProx, FedMA, etc. Also, we show that this methodology leads to compute and bandwidth optimizations under certain documented conditions.
Distributed Path Planning for Executing Cooperative Tasks with Time Windows
Aug 15, 2019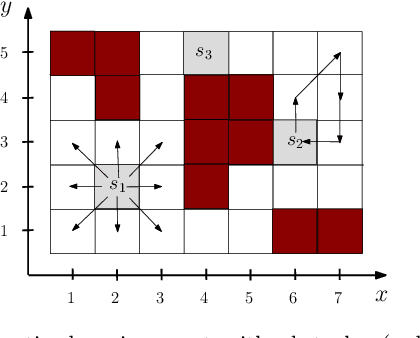
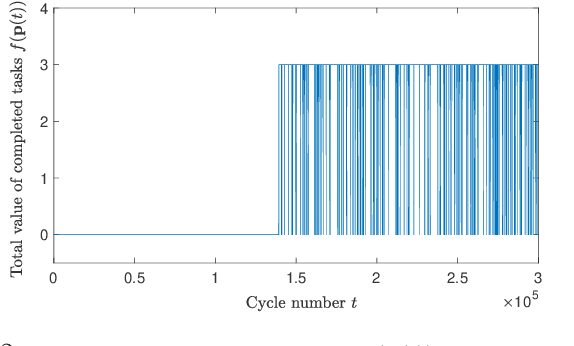
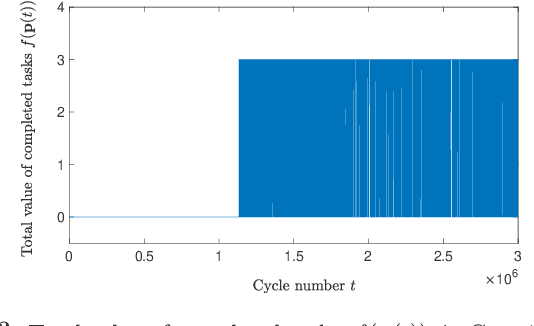
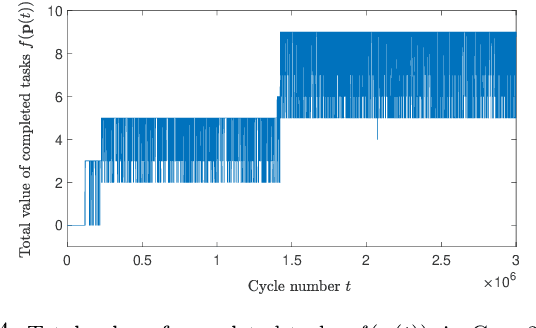
We investigate the distributed planning of robot trajectories for optimal execution of cooperative tasks with time windows. In this setting, each task has a value and is completed if sufficiently many robots are simultaneously present at the necessary location within the specified time window. Tasks keep arriving periodically over cycles. The task specifications (required number of robots, location, time window, and value) are unknown a priori and the robots try to maximize the value of completed tasks by planning their own trajectories for the upcoming cycle based on their past observations in a distributed manner. Considering the recharging and maintenance needs, robots are required to start and end each cycle at their assigned stations located in the environment. We map this problem to a game theoretic formulation and maximize the collective performance through distributed learning. Some simulation results are also provided to demonstrate the performance of the proposed approach.
NTP : A Neural Network Topology Profiler
May 25, 2019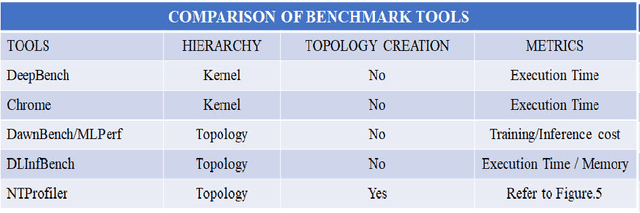
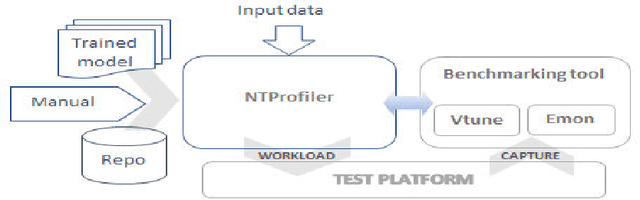
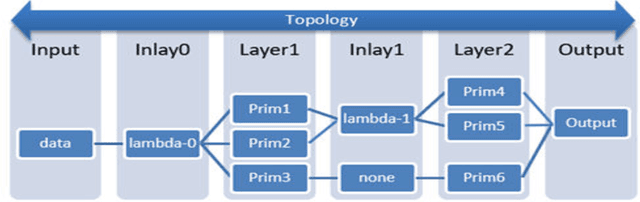
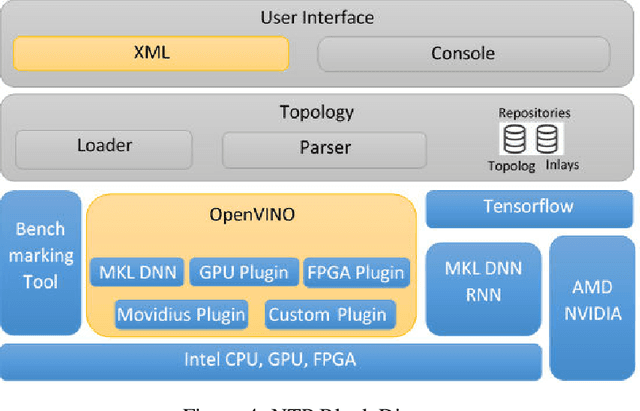
Performance of end-to-end neural networks on a given hardware platform is a function of its compute and memory signature, which in-turn, is governed by a wide range of parameters such as topology size, primitives used, framework used, batching strategy, latency requirements, precision etc. Current benchmarking tools suffer from limitations such as a) being either too granular like DeepBench [1] (or) b) mandate a working implementation that is either framework specific or hardware-architecture specific or both (or) c) provide only high level benchmark metrics. In this paper, we present NTP (Neural Net Topology Profiler), a sophisticated benchmarking framework, to effectively identify memory and compute signature of an end-to-end topology on multiple hardware architectures, without the need for an actual implementation. NTP is tightly integrated with hardware specific benchmarking tools to enable exhaustive data collection and analysis. Using NTP, a deep learning researcher can quickly establish baselines needed to understand performance of an end-to-end neural network topology and make high level architectural decisions. Further, integration of NTP with frameworks like Tensorflow, Pytorch, Intel OpenVINO etc. allows for performance comparison along several vectors like a) Comparison of different frameworks on a given hardware b) Comparison of different hardware using a given framework c) Comparison across different heterogeneous hardware configurations for given framework etc. These capabilities empower a researcher to effortlessly make architectural decisions needed for achieving optimized performance on any hardware platform. The paper documents the architectural approach of NTP and demonstrates the capabilities of the tool by benchmarking Mozilla DeepSpeech, a popular Speech Recognition topology.