 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeBezierFormer: A Unified Architecture for 2D and 3D Lane Detection
Apr 25, 2024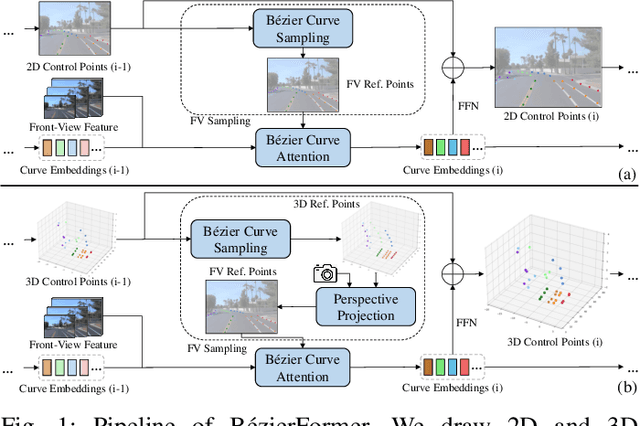
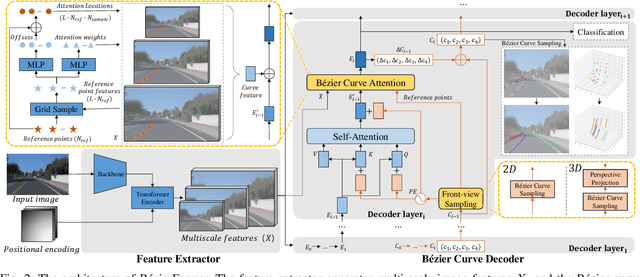
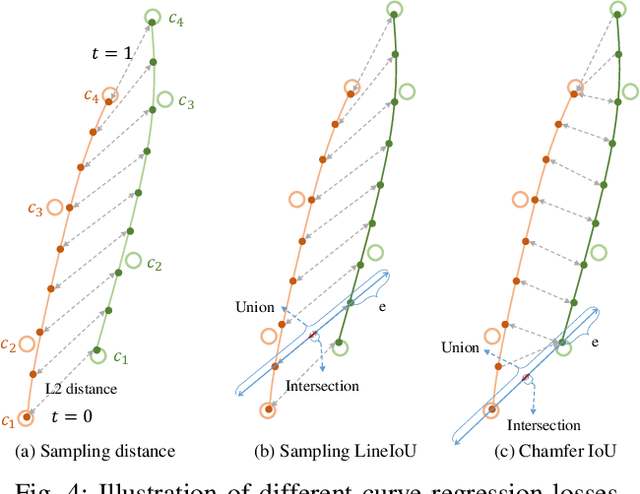
Lane detection has made significant progress in recent years, but there is not a unified architecture for its two sub-tasks: 2D lane detection and 3D lane detection. To fill this gap, we introduce B\'{e}zierFormer, a unified 2D and 3D lane detection architecture based on B\'{e}zier curve lane representation. B\'{e}zierFormer formulate queries as B\'{e}zier control points and incorporate a novel B\'{e}zier curve attention mechanism. This attention mechanism enables comprehensive and accurate feature extraction for slender lane curves via sampling and fusing multiple reference points on each curve. In addition, we propose a novel Chamfer IoU-based loss which is more suitable for the B\'{e}zier control points regression. The state-of-the-art performance of B\'{e}zierFormer on widely-used 2D and 3D lane detection benchmarks verifies its effectiveness and suggests the worthiness of further exploration.
NeMO: Neural Map Growing System for Spatiotemporal Fusion in Bird's-Eye-View and BDD-Map Benchmark
Jun 07, 2023

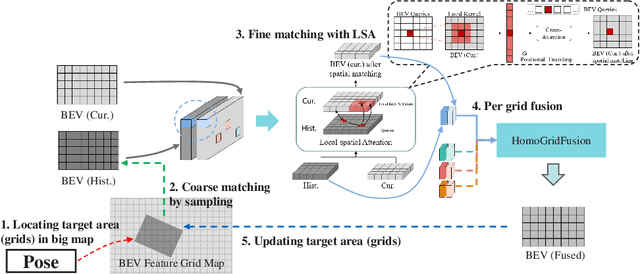

Vision-centric Bird's-Eye View (BEV) representation is essential for autonomous driving systems (ADS). Multi-frame temporal fusion which leverages historical information has been demonstrated to provide more comprehensive perception results. While most research focuses on ego-centric maps of fixed settings, long-range local map generation remains less explored. This work outlines a new paradigm, named NeMO, for generating local maps through the utilization of a readable and writable big map, a learning-based fusion module, and an interaction mechanism between the two. With an assumption that the feature distribution of all BEV grids follows an identical pattern, we adopt a shared-weight neural network for all grids to update the big map. This paradigm supports the fusion of longer time series and the generation of long-range BEV local maps. Furthermore, we release BDD-Map, a BDD100K-based dataset incorporating map element annotations, including lane lines, boundaries, and pedestrian crossing. Experiments on the NuScenes and BDD-Map datasets demonstrate that NeMO outperforms state-of-the-art map segmentation methods. We also provide a new scene-level BEV map evaluation setting along with the corresponding baseline for a more comprehensive comparison.