 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeBezierFormer: A Unified Architecture for 2D and 3D Lane Detection
Paper and Code
Apr 25, 2024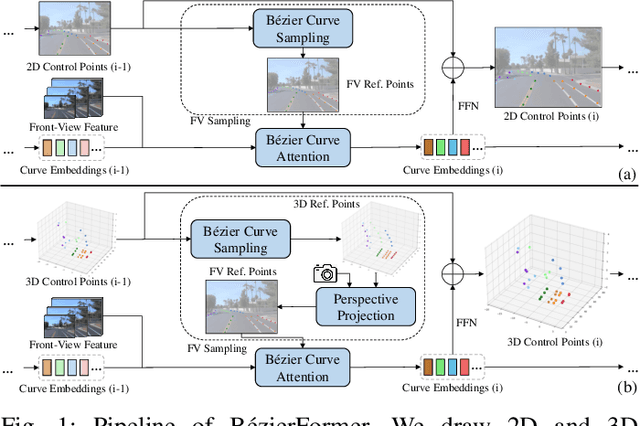
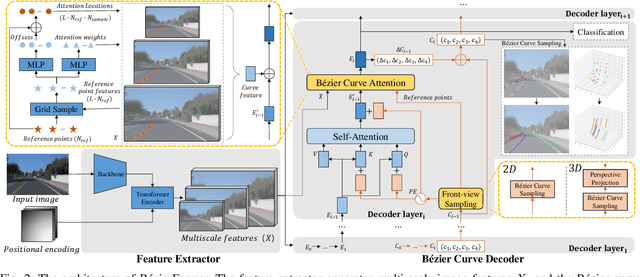
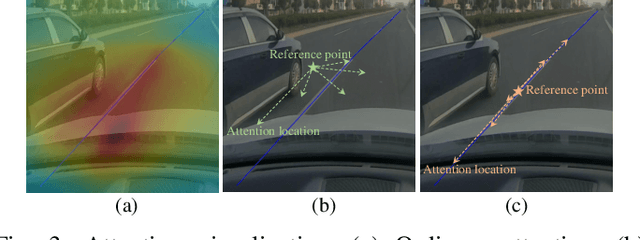
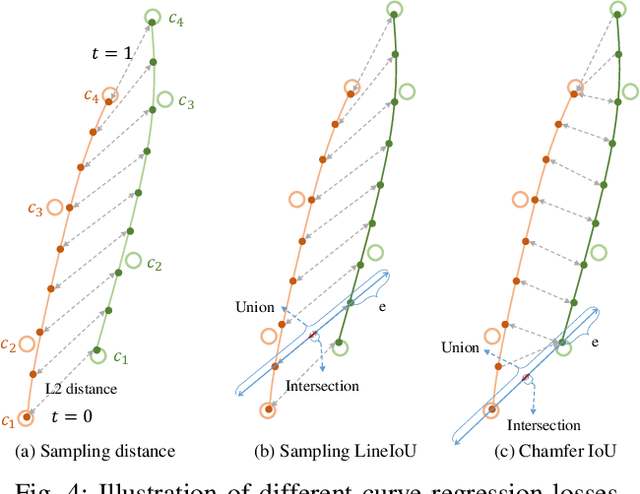
Lane detection has made significant progress in recent years, but there is not a unified architecture for its two sub-tasks: 2D lane detection and 3D lane detection. To fill this gap, we introduce B\'{e}zierFormer, a unified 2D and 3D lane detection architecture based on B\'{e}zier curve lane representation. B\'{e}zierFormer formulate queries as B\'{e}zier control points and incorporate a novel B\'{e}zier curve attention mechanism. This attention mechanism enables comprehensive and accurate feature extraction for slender lane curves via sampling and fusing multiple reference points on each curve. In addition, we propose a novel Chamfer IoU-based loss which is more suitable for the B\'{e}zier control points regression. The state-of-the-art performance of B\'{e}zierFormer on widely-used 2D and 3D lane detection benchmarks verifies its effectiveness and suggests the worthiness of further exploration.