 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeNo More Pesky Hyperparameters: Offline Hyperparameter Tuning for RL
May 18, 2022
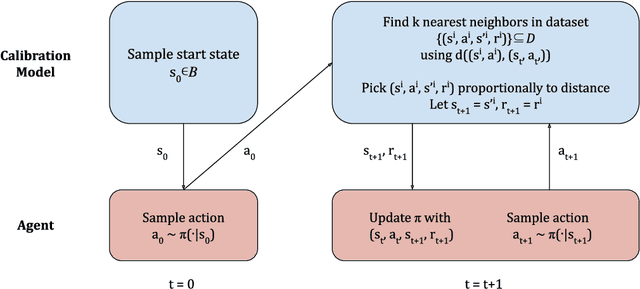
The performance of reinforcement learning (RL) agents is sensitive to the choice of hyperparameters. In real-world settings like robotics or industrial control systems, however, testing different hyperparameter configurations directly on the environment can be financially prohibitive, dangerous, or time consuming. We propose a new approach to tune hyperparameters from offline logs of data, to fully specify the hyperparameters for an RL agent that learns online in the real world. The approach is conceptually simple: we first learn a model of the environment from the offline data, which we call a calibration model, and then simulate learning in the calibration model to identify promising hyperparameters. We identify several criteria to make this strategy effective, and develop an approach that satisfies these criteria. We empirically investigate the method in a variety of settings to identify when it is effective and when it fails.