 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeOpen Human-Robot Collaboration using Decentralized Inverse Reinforcement Learning
Oct 02, 2024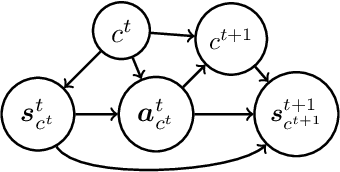
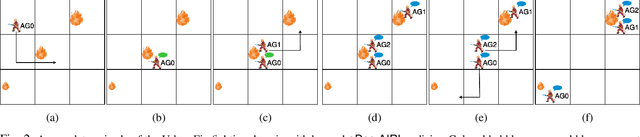
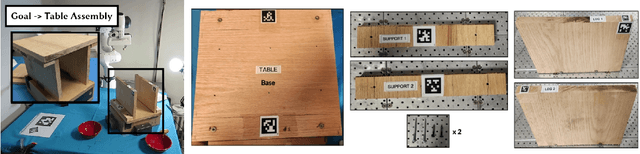
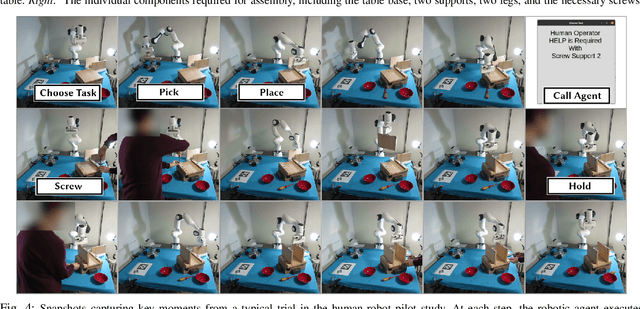
The growing interest in human-robot collaboration (HRC), where humans and robots cooperate towards shared goals, has seen significant advancements over the past decade. While previous research has addressed various challenges, several key issues remain unresolved. Many domains within HRC involve activities that do not necessarily require human presence throughout the entire task. Existing literature typically models HRC as a closed system, where all agents are present for the entire duration of the task. In contrast, an open model offers flexibility by allowing an agent to enter and exit the collaboration as needed, enabling them to concurrently manage other tasks. In this paper, we introduce a novel multiagent framework called oDec-MDP, designed specifically to model open HRC scenarios where agents can join or leave tasks flexibly during execution. We generalize a recent multiagent inverse reinforcement learning method - Dec-AIRL to learn from open systems modeled using the oDec-MDP. Our method is validated through experiments conducted in both a simplified toy firefighting domain and a realistic dyadic human-robot collaborative assembly. Results show that our framework and learning method improves upon its closed system counterpart.
Marginal MAP Estimation for Inverse RL under Occlusion with Observer Noise
Sep 16, 2021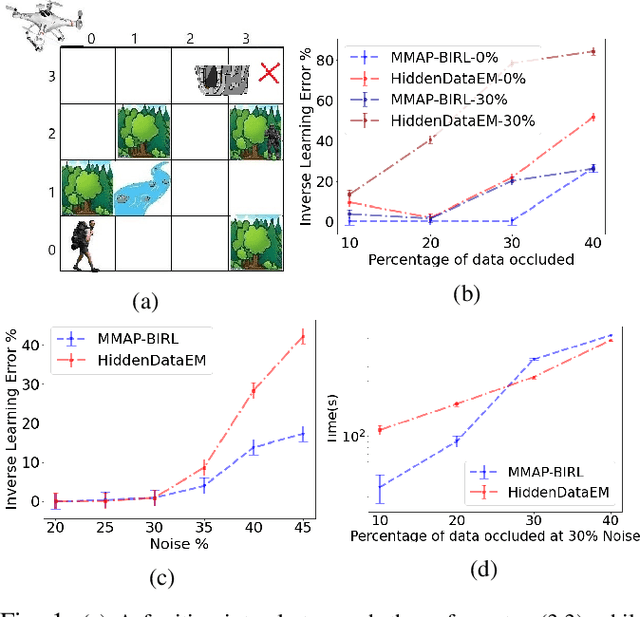
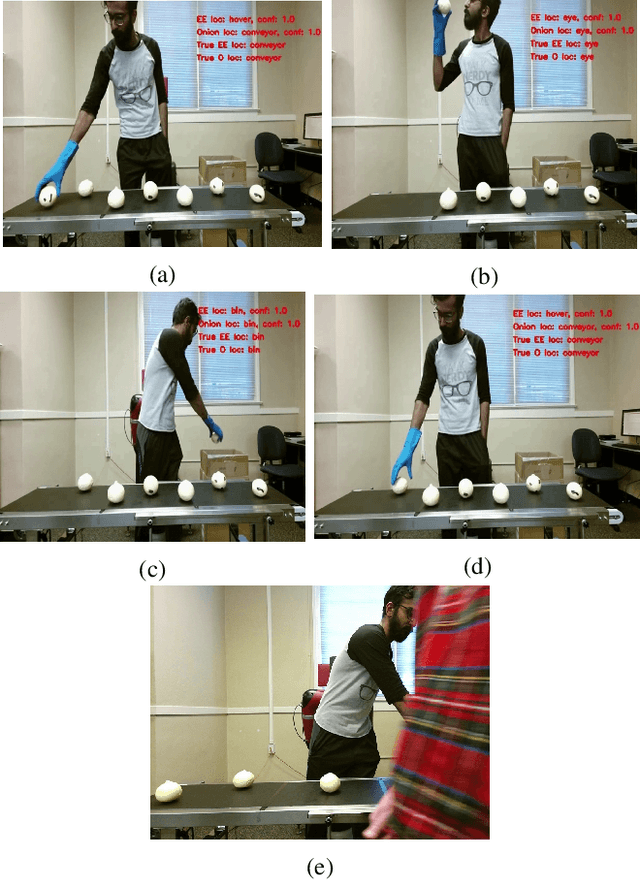

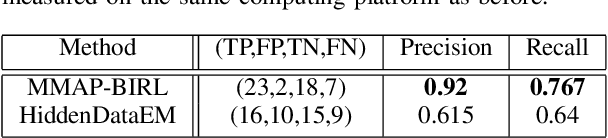
We consider the problem of learning the behavioral preferences of an expert engaged in a task from noisy and partially-observable demonstrations. This is motivated by real-world applications such as a line robot learning from observing a human worker, where some observations are occluded by environmental objects that cannot be removed. Furthermore, robotic perception tends to be imperfect and noisy. Previous techniques for inverse reinforcement learning (IRL) take the approach of either omitting the missing portions or inferring it as part of expectation-maximization, which tends to be slow and prone to local optima. We present a new method that generalizes the well-known Bayesian maximum-a-posteriori (MAP) IRL method by marginalizing the occluded portions of the trajectory. This is additionally extended with an observation model to account for perception noise. We show that the marginal MAP (MMAP) approach significantly improves on the previous IRL technique under occlusion in both formative evaluations on a toy problem and in a summative evaluation on an onion sorting line task by a robot.
DeepMSRF: A novel Deep Multimodal Speaker Recognition framework with Feature selection
Jul 21, 2020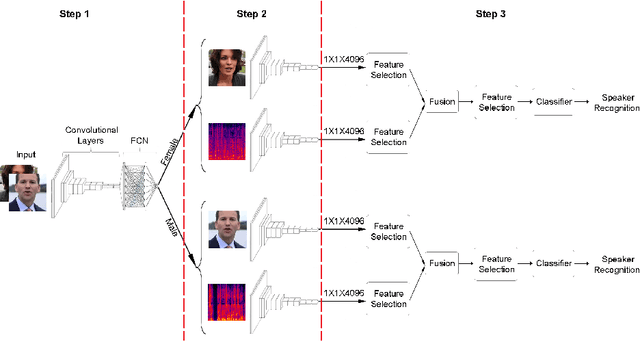
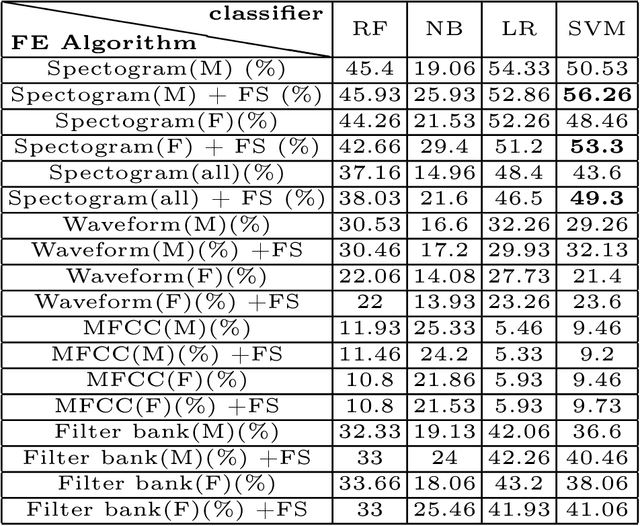
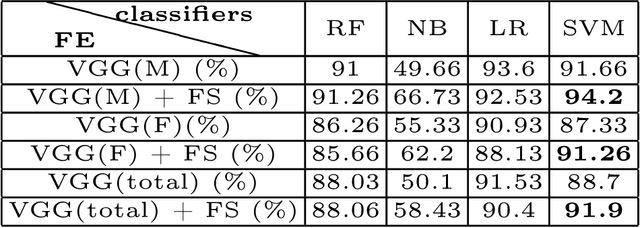
For recognizing speakers in video streams, significant research studies have been made to obtain a rich machine learning model by extracting high-level speaker's features such as facial expression, emotion, and gender. However, generating such a model is not feasible by using only single modality feature extractors that exploit either audio signals or image frames, extracted from video streams. In this paper, we address this problem from a different perspective and propose an unprecedented multimodality data fusion framework called DeepMSRF, Deep Multimodal Speaker Recognition with Feature selection. We execute DeepMSRF by feeding features of the two modalities, namely speakers' audios and face images. DeepMSRF uses a two-stream VGGNET to train on both modalities to reach a comprehensive model capable of accurately recognizing the speaker's identity. We apply DeepMSRF on a subset of VoxCeleb2 dataset with its metadata merged with VGGFace2 dataset. The goal of DeepMSRF is to identify the gender of the speaker first, and further to recognize his or her name for any given video stream. The experimental results illustrate that DeepMSRF outperforms single modality speaker recognition methods with at least 3 percent accuracy.