 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeFeature Space Perturbation: A Panacea to Enhanced Transferability Estimation
Feb 23, 2025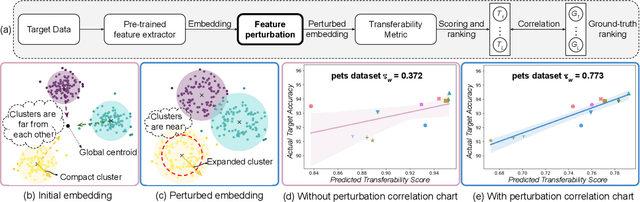
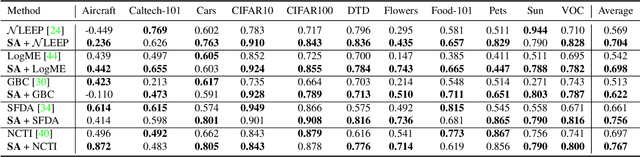
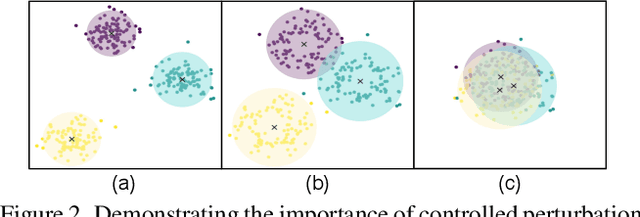
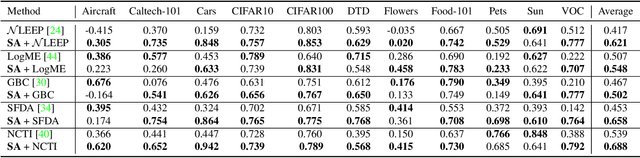
Leveraging a transferability estimation metric facilitates the non-trivial challenge of selecting the optimal model for the downstream task from a pool of pre-trained models. Most existing metrics primarily focus on identifying the statistical relationship between feature embeddings and the corresponding labels within the target dataset, but overlook crucial aspect of model robustness. This oversight may limit their effectiveness in accurately ranking pre-trained models. To address this limitation, we introduce a feature perturbation method that enhances the transferability estimation process by systematically altering the feature space. Our method includes a Spread operation that increases intra-class variability, adding complexity within classes, and an Attract operation that minimizes the distances between different classes, thereby blurring the class boundaries. Through extensive experimentation, we demonstrate the efficacy of our feature perturbation method in providing a more precise and robust estimation of model transferability. Notably, the existing LogMe method exhibited a significant improvement, showing a 28.84% increase in performance after applying our feature perturbation method.
A Fine-Grained Vehicle Detection Dataset for Unconstrained Roads
Dec 30, 2022
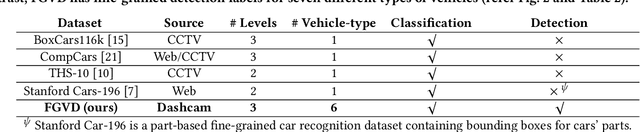

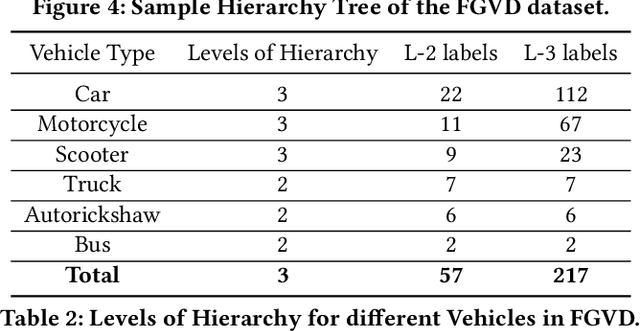
The previous fine-grained datasets mainly focus on classification and are often captured in a controlled setup, with the camera focusing on the objects. We introduce the first Fine-Grained Vehicle Detection (FGVD) dataset in the wild, captured from a moving camera mounted on a car. It contains 5502 scene images with 210 unique fine-grained labels of multiple vehicle types organized in a three-level hierarchy. While previous classification datasets also include makes for different kinds of cars, the FGVD dataset introduces new class labels for categorizing two-wheelers, autorickshaws, and trucks. The FGVD dataset is challenging as it has vehicles in complex traffic scenarios with intra-class and inter-class variations in types, scale, pose, occlusion, and lighting conditions. The current object detectors like yolov5 and faster RCNN perform poorly on our dataset due to a lack of hierarchical modeling. Along with providing baseline results for existing object detectors on FGVD Dataset, we also present the results of a combination of an existing detector and the recent Hierarchical Residual Network (HRN) classifier for the FGVD task. Finally, we show that FGVD vehicle images are the most challenging to classify among the fine-grained datasets.