 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeVisualizing Convolutional Neural Networks to Improve Decision Support for Skin Lesion Classification
Sep 11, 2018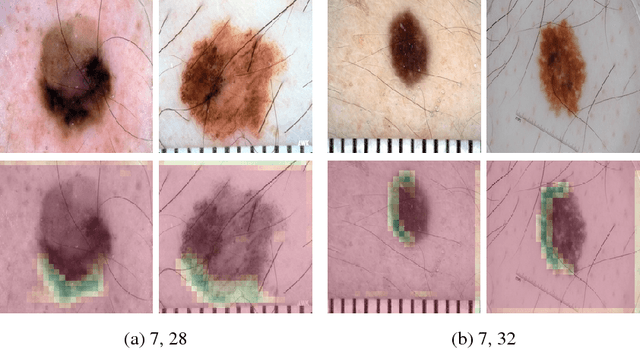
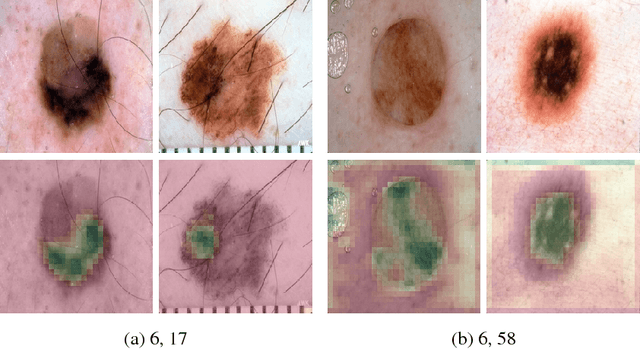
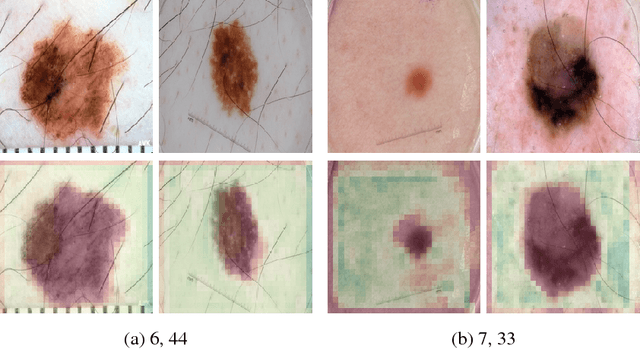
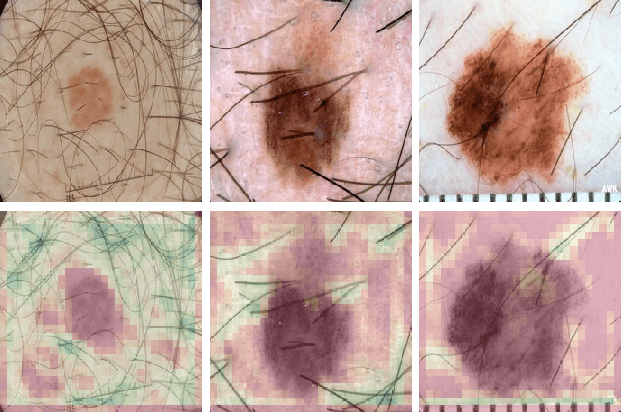
Because of their state-of-the-art performance in computer vision, CNNs are becoming increasingly popular in a variety of fields, including medicine. However, as neural networks are black box function approximators, it is difficult, if not impossible, for a medical expert to reason about their output. This could potentially result in the expert distrusting the network when he or she does not agree with its output. In such a case, explaining why the CNN makes a certain decision becomes valuable information. In this paper, we try to open the black box of the CNN by inspecting and visualizing the learned feature maps, in the field of dermatology. We show that, to some extent, CNNs focus on features similar to those used by dermatologists to make a diagnosis. However, more research is required for fully explaining their output.
Learning to Grasp from a Single Demonstration
Jun 09, 2018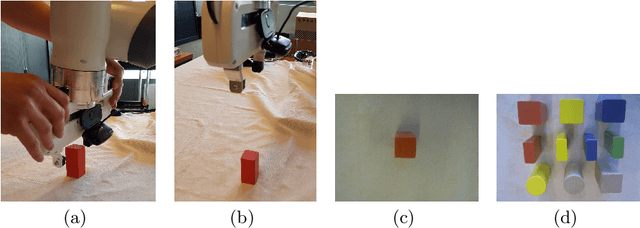
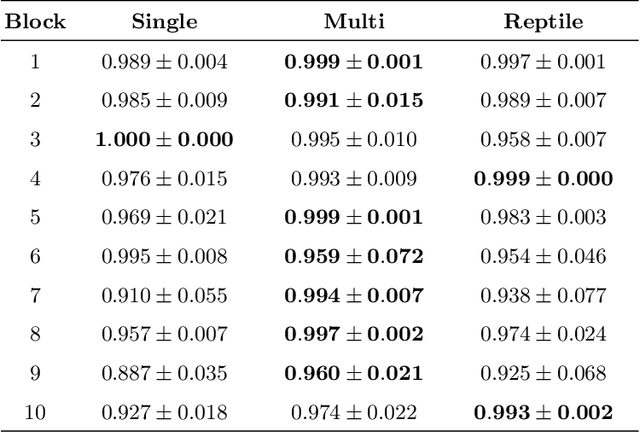
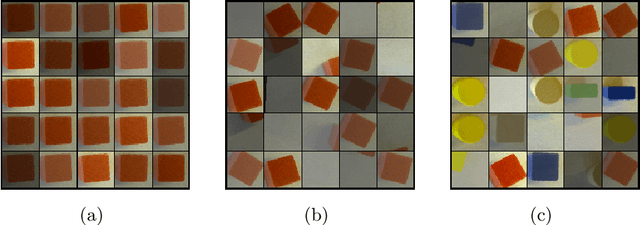

Learning-based approaches for robotic grasping using visual sensors typically require collecting a large size dataset, either manually labeled or by many trial and errors of a robotic manipulator in the real or simulated world. We propose a simpler learning-from-demonstration approach that is able to detect the object to grasp from merely a single demonstration using a convolutional neural network we call GraspNet. In order to increase robustness and decrease the training time even further, we leverage data from previous demonstrations to quickly fine-tune a GrapNet for each new demonstration. We present some preliminary results on a grasping experiment with the Franka Panda cobot for which we can train a GraspNet with only hundreds of train iterations.
Decoupled Learning of Environment Characteristics for Safe Exploration
Aug 09, 2017


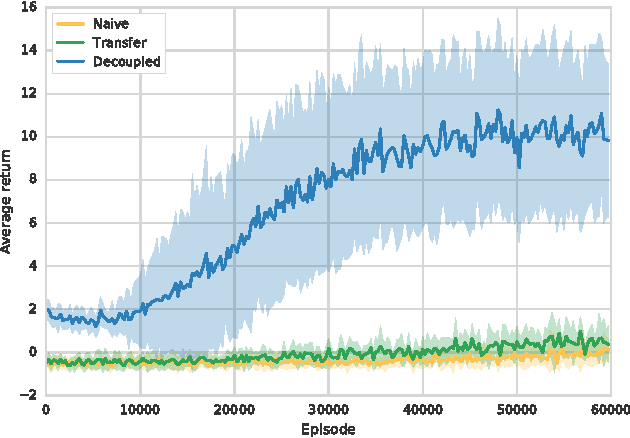
Reinforcement learning is a proven technique for an agent to learn a task. However, when learning a task using reinforcement learning, the agent cannot distinguish the characteristics of the environment from those of the task. This makes it harder to transfer skills between tasks in the same environment. Furthermore, this does not reduce risk when training for a new task. In this paper, we introduce an approach to decouple the environment characteristics from the task-specific ones, allowing an agent to develop a sense of survival. We evaluate our approach in an environment where an agent must learn a sequence of collection tasks, and show that decoupled learning allows for a safer utilization of prior knowledge.