Get our free extension to see links to code for papers anywhere online!Free add-on: code for papers everywhere!Free add-on: See code for papers anywhere!
 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeDecoupled Learning of Environment Characteristics for Safe Exploration
Paper and Code
Aug 09, 2017


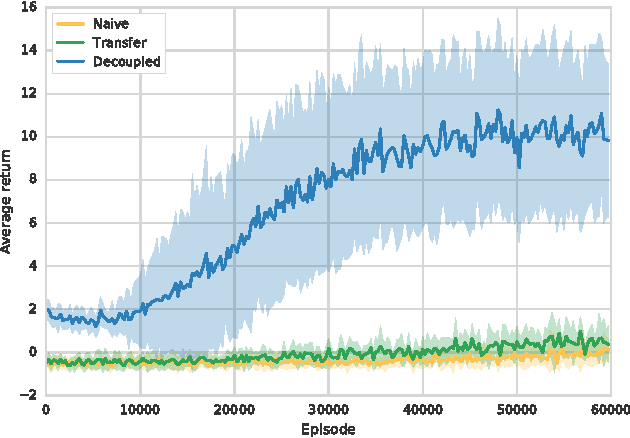
Reinforcement learning is a proven technique for an agent to learn a task. However, when learning a task using reinforcement learning, the agent cannot distinguish the characteristics of the environment from those of the task. This makes it harder to transfer skills between tasks in the same environment. Furthermore, this does not reduce risk when training for a new task. In this paper, we introduce an approach to decouple the environment characteristics from the task-specific ones, allowing an agent to develop a sense of survival. We evaluate our approach in an environment where an agent must learn a sequence of collection tasks, and show that decoupled learning allows for a safer utilization of prior knowledge.
* 4 pages, 4 figures, ICML 2017 workshop on Reliable Machine Learning
in the Wild
View paper on