 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeLearning to Grasp from a Single Demonstration
Jun 09, 2018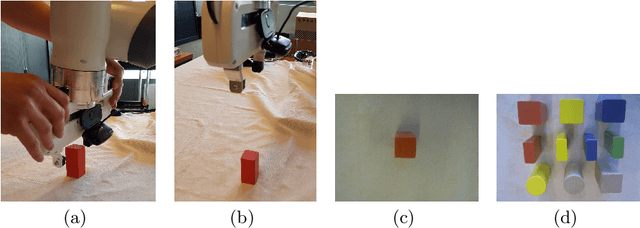
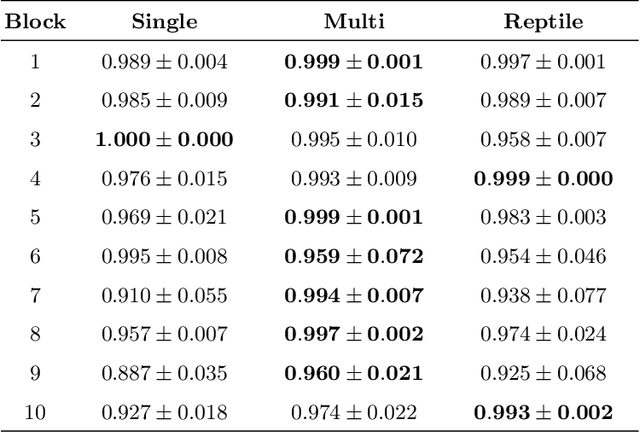
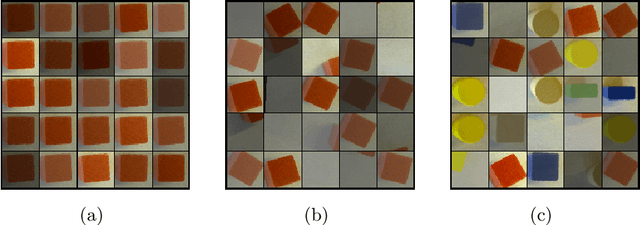

Learning-based approaches for robotic grasping using visual sensors typically require collecting a large size dataset, either manually labeled or by many trial and errors of a robotic manipulator in the real or simulated world. We propose a simpler learning-from-demonstration approach that is able to detect the object to grasp from merely a single demonstration using a convolutional neural network we call GraspNet. In order to increase robustness and decrease the training time even further, we leverage data from previous demonstrations to quickly fine-tune a GrapNet for each new demonstration. We present some preliminary results on a grasping experiment with the Franka Panda cobot for which we can train a GraspNet with only hundreds of train iterations.
Sensor Fusion for Robot Control through Deep Reinforcement Learning
Mar 13, 2017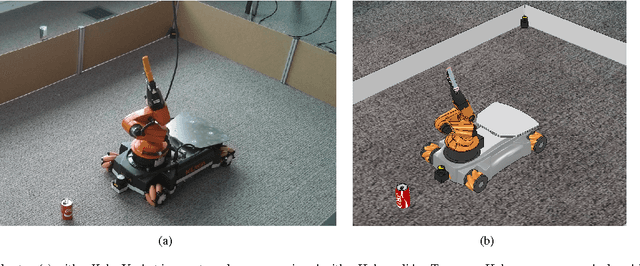
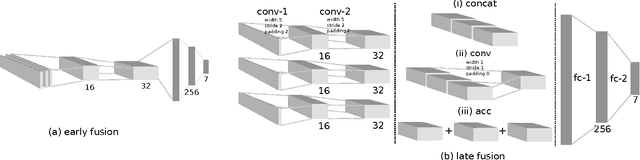
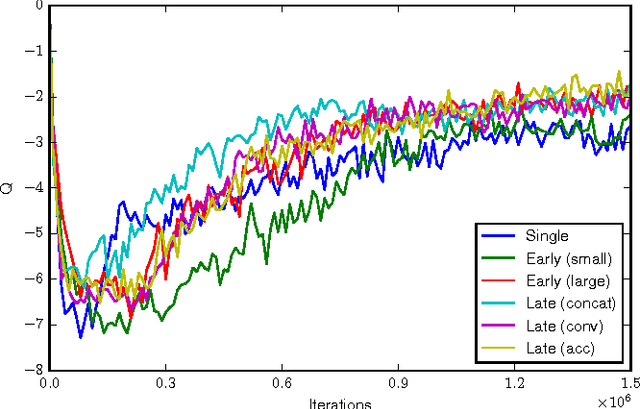
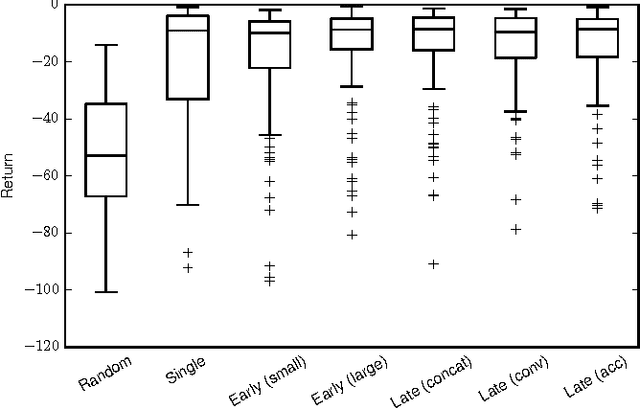
Deep reinforcement learning is becoming increasingly popular for robot control algorithms, with the aim for a robot to self-learn useful feature representations from unstructured sensory input leading to the optimal actuation policy. In addition to sensors mounted on the robot, sensors might also be deployed in the environment, although these might need to be accessed via an unreliable wireless connection. In this paper, we demonstrate deep neural network architectures that are able to fuse information coming from multiple sensors and are robust to sensor failures at runtime. We evaluate our method on a search and pick task for a robot both in simulation and the real world.
Lazy Evaluation of Convolutional Filters
May 27, 2016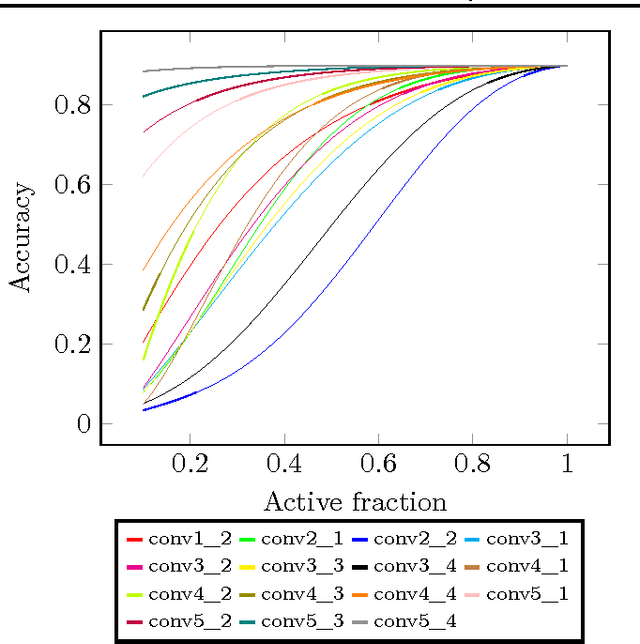
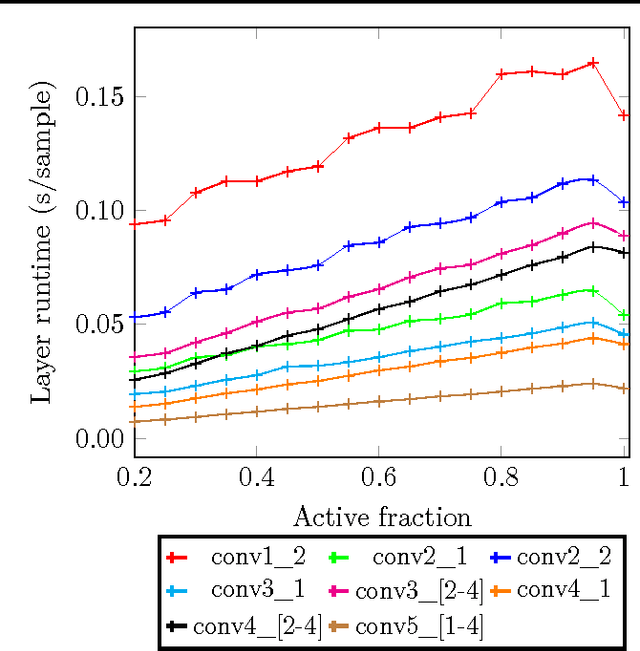
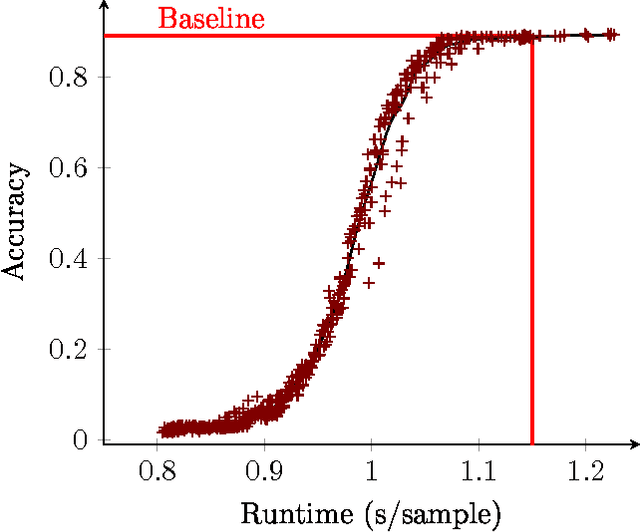
In this paper we propose a technique which avoids the evaluation of certain convolutional filters in a deep neural network. This allows to trade-off the accuracy of a deep neural network with the computational and memory requirements. This is especially important on a constrained device unable to hold all the weights of the network in memory.