 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeLearning to Grasp from a Single Demonstration
Paper and Code
Jun 09, 2018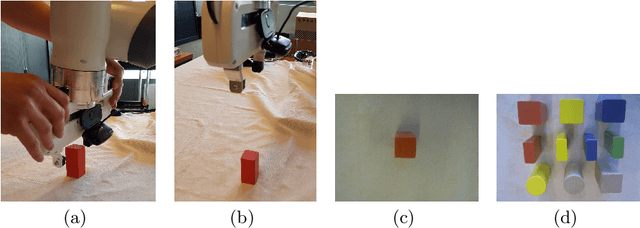

Learning-based approaches for robotic grasping using visual sensors typically require collecting a large size dataset, either manually labeled or by many trial and errors of a robotic manipulator in the real or simulated world. We propose a simpler learning-from-demonstration approach that is able to detect the object to grasp from merely a single demonstration using a convolutional neural network we call GraspNet. In order to increase robustness and decrease the training time even further, we leverage data from previous demonstrations to quickly fine-tune a GrapNet for each new demonstration. We present some preliminary results on a grasping experiment with the Franka Panda cobot for which we can train a GraspNet with only hundreds of train iterations.