 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeSurReal: enhancing Surgical simulation Realism using style transfer
Nov 07, 2018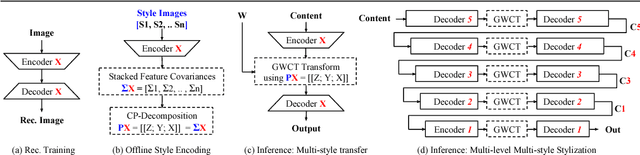
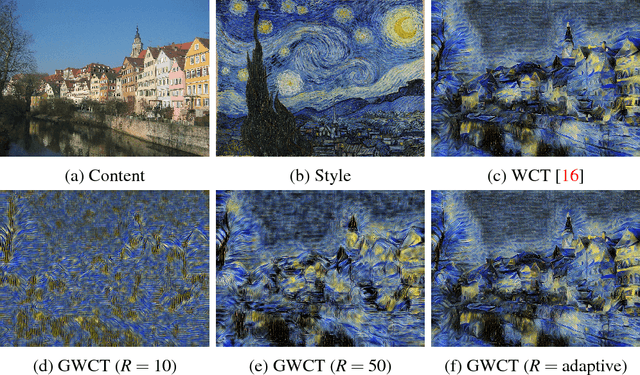
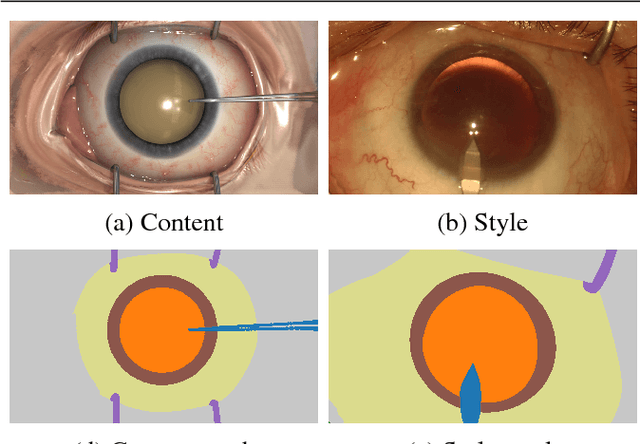

Surgical simulation is an increasingly important element of surgical education. Using simulation can be a means to address some of the significant challenges in developing surgical skills with limited time and resources. The photo-realistic fidelity of simulations is a key feature that can improve the experience and transfer ratio of trainees. In this paper, we demonstrate how we can enhance the visual fidelity of existing surgical simulation by performing style transfer of multi-class labels from real surgical video onto synthetic content. We demonstrate our approach on simulations of cataract surgery using real data labels from an existing public dataset. Our results highlight the feasibility of the approach and also the powerful possibility to extend this technique to incorporate additional temporal constraints and to different applications.
Intraoperative robotic-assisted large-area high-speed microscopic imaging and intervention
Aug 13, 2018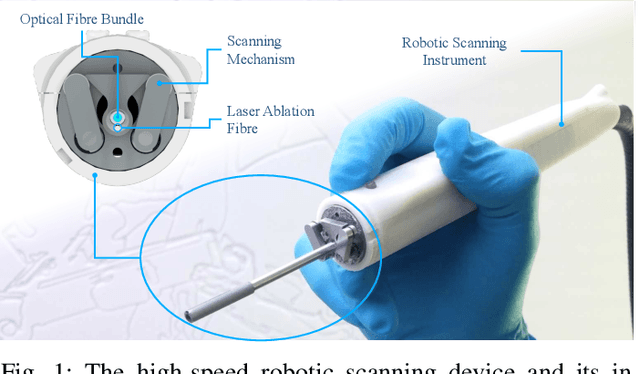
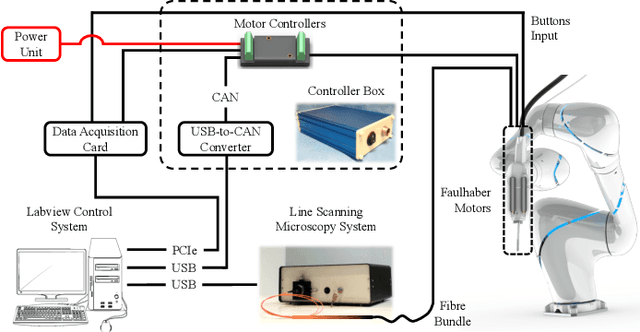
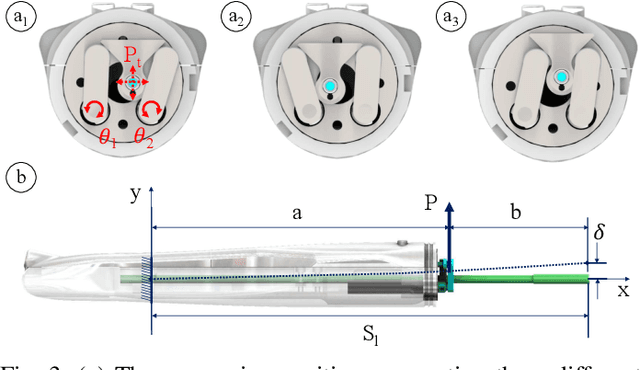
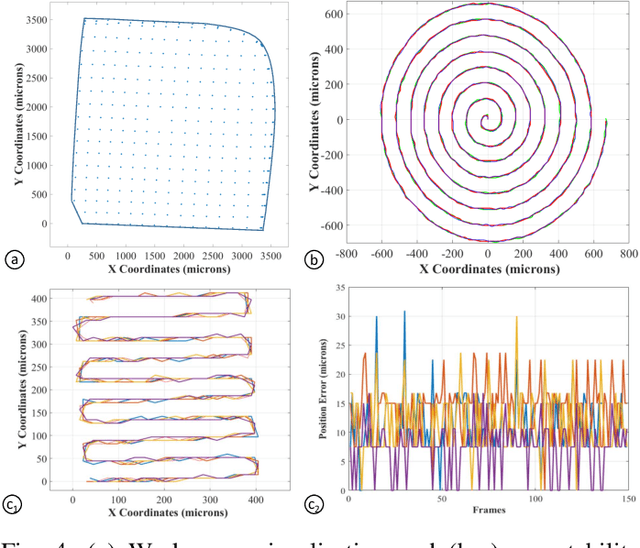
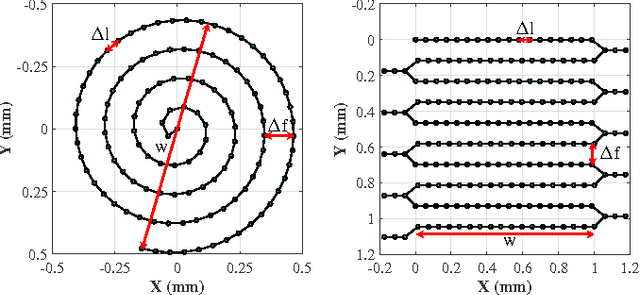
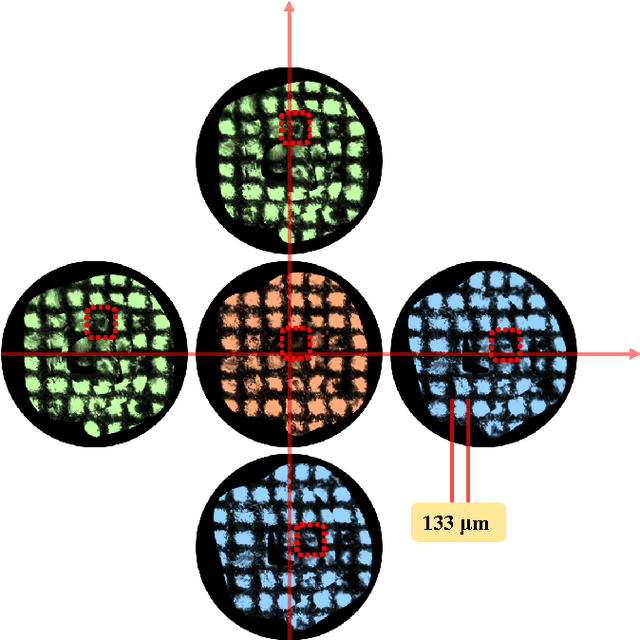
Objective: Probe-based confocal endomicroscopy is an emerging high-magnification optical imaging technique that provides in vivo and in situ cellular-level imaging for real-time assessment of tissue pathology. Endomicroscopy could potentially be used for intraoperative surgical guidance, but it is challenging to assess a surgical site using individual microscopic images due to the limited field-of-view and difficulties associated with manually manipulating the probe. Methods: In this paper, a novel robotic device for large-area endomicroscopy imaging is proposed, demonstrating a rapid, but highly accurate, scanning mechanism with image-based motion control which is able to generate histology-like endomicroscopy mosaics. The device also includes, for the first time in robotic-assisted endomicroscopy, the capability to ablate tissue without the need for an additional tool. Results: The device achieves pre-programmed trajectories with positioning accuracy of less than 30 um, while the image-based approach demonstrated that it can suppress random motion disturbances up to 1.25 mm/s. Mosaics are presented from a range of ex vivo human and animal tissues, over areas of more than 3 mm^2, scanned in approximate 10 seconds. Conclusion: This work demonstrates the potential of the proposed instrument to generate large-area, high-resolution microscopic images for intraoperative tissue identification and margin assessment. Significance: This approach presents an important alternative to current histology techniques, significantly reducing the tissue assessment time, while simultaneously providing the capability to mark and ablate suspicious areas intraoperatively.
Affordable Mobile-based Simulator for Robotic Surgery
Jul 20, 2018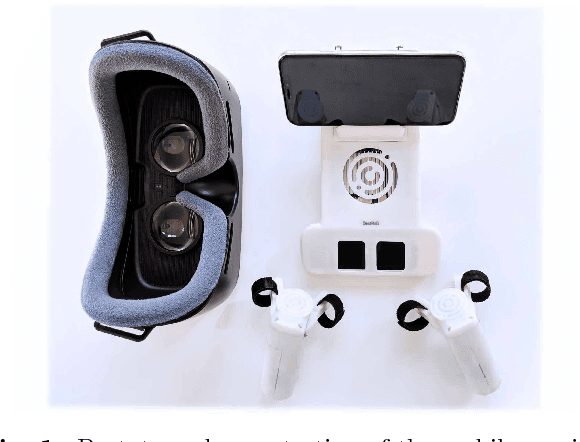
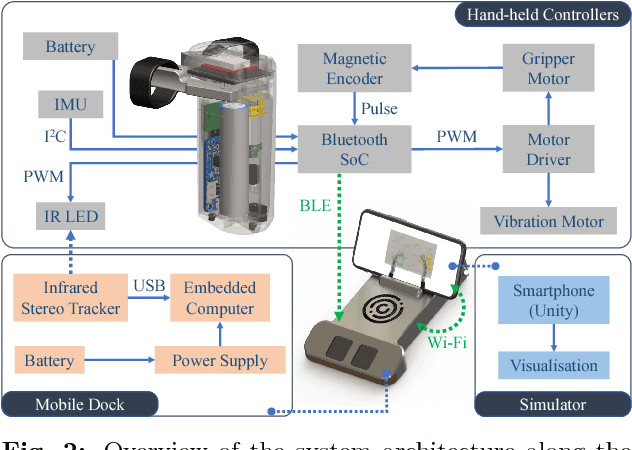

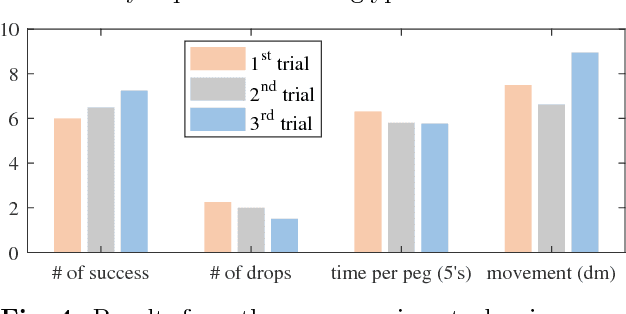
Robotic surgery and novel surgical instrumentation present great potentials towards safer, more accurate and consistent minimally invasive surgery. However, their adoption is dependent to the access to training facilities and extensive surgical training. Robotic instruments require different dexterity skills compared to open or laparoscopic. Surgeons, therefore, are required to invest significant time by attending extensive training programs. Contrary, hands on experiences represent an additional operational cost for hospitals as the availability of robotic systems for training purposes is limited. All these technological and financial barriers for surgeons and hospitals hinder the adoption of robotic surgery. In this paper, we present a mobile dexterity training kit to develop basic surgical techniques within an affordable setting. The system could be used to train basic surgical gestures and to develop the motor skills needed for manoeuvring robotic instruments. Our work presents the architecture and components needed to create a simulated environment for training sub-tasks as well as a design for portable mobile manipulators that can be used as master controllers of different instruments. A preliminary study results demonstrate usability and skills development with this system.
DeepPhase: Surgical Phase Recognition in CATARACTS Videos
Jul 17, 2018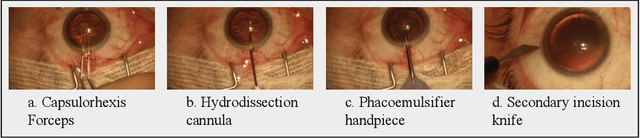
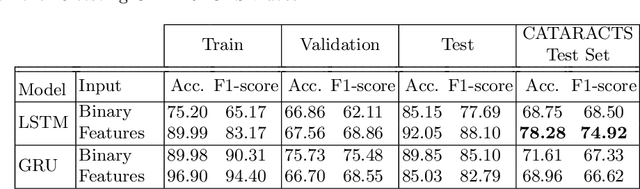
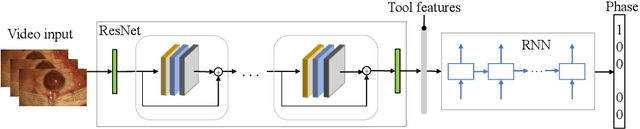
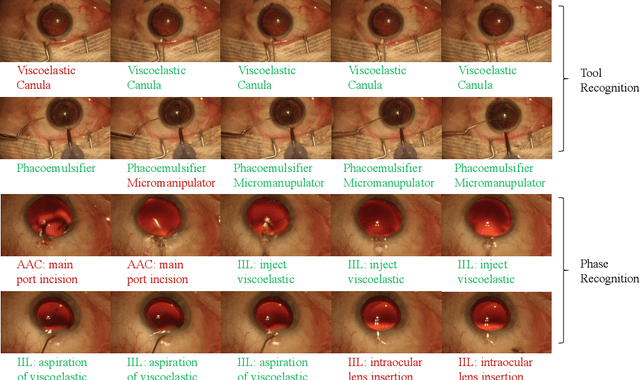
Automated surgical workflow analysis and understanding can assist surgeons to standardize procedures and enhance post-surgical assessment and indexing, as well as, interventional monitoring. Computer-assisted interventional (CAI) systems based on video can perform workflow estimation through surgical instruments' recognition while linking them to an ontology of procedural phases. In this work, we adopt a deep learning paradigm to detect surgical instruments in cataract surgery videos which in turn feed a surgical phase inference recurrent network that encodes temporal aspects of phase steps within the phase classification. Our models present comparable to state-of-the-art results for surgical tool detection and phase recognition with accuracies of 99 and 78% respectively.
Autonomous Scanning for Endomicroscopic Mosaicing and 3D Fusion
Oct 21, 2016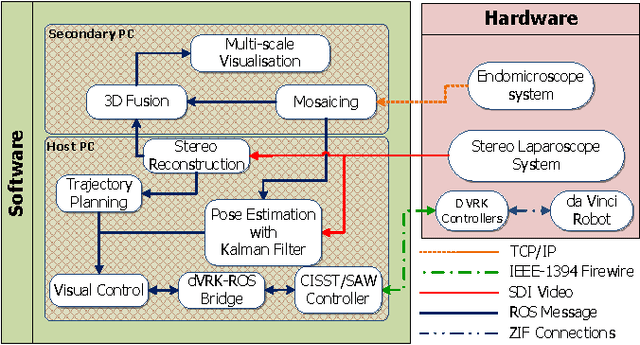
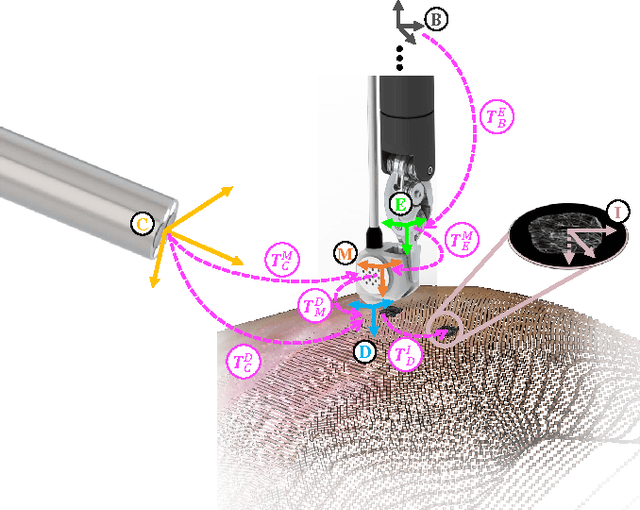
Robotic-assisted Minimally Invasive Surgery (RMIS) can benefit from the automation of common, repetitive or well-defined but ergonomically difficult tasks. One such task is the scanning of a pick-up endomicroscopy probe over a complex, undulating tissue surface in order to enhance the effective field-of-view through video mosaicing. In this paper, the da Vinci surgical robot, through the dVRK framework, is used for autonomous scanning and 2D mosaicing over a user-defined region of interest. To achieve the level of precision required for high quality large-area mosaic generation, which relies on sufficient overlap between consecutive image frames, visual servoing is performed using a tracking marker attached to the probe. The resulting sub-millimetre accuracy of the probe motion allows for the generation of large endomicroscopy mo- saics with minimal intervention from the surgeon. It also allows the probe to be maintained in an orientation perpendicular to the local tissue surface, providing optimal imaging results. Images are streamed from the endomicroscope and overlaid live onto the surgeons view, while 2D mosaics are generated in real-time, and fused into a 3D stereo reconstruction of the surgical scene, thus providing intuitive visualisation and fusion of the multi-scale images. The system therefore offers significant potential to enhance surgical procedures, by providing the operator with cellular-scale information over a larger area than could typically be achieved by manual scanning.