 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeIntraoperative robotic-assisted large-area high-speed microscopic imaging and intervention
Aug 13, 2018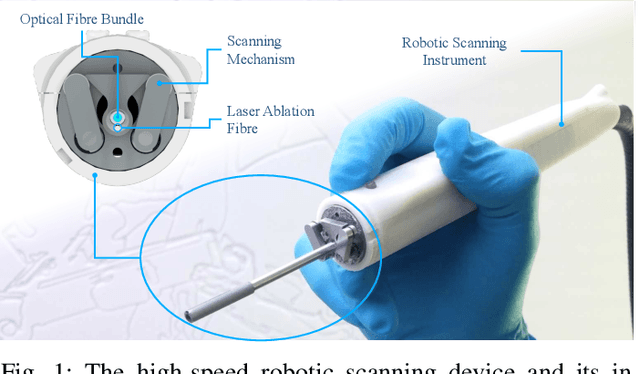
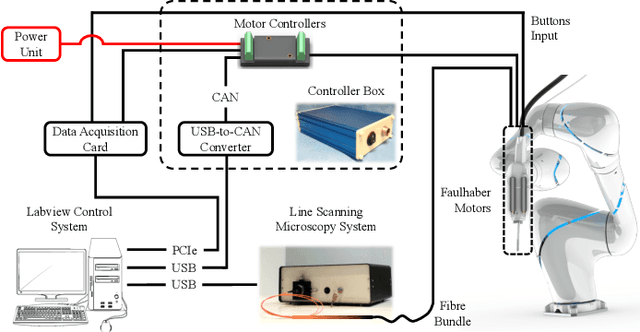
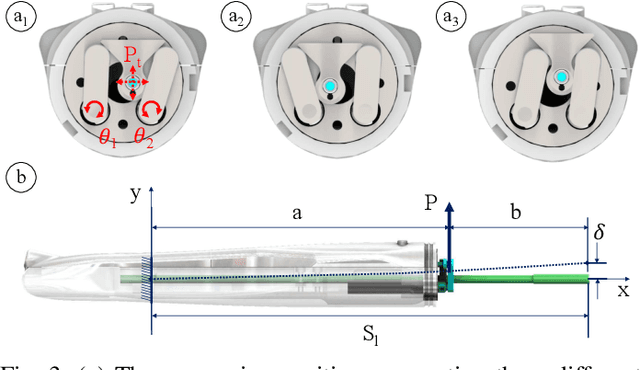
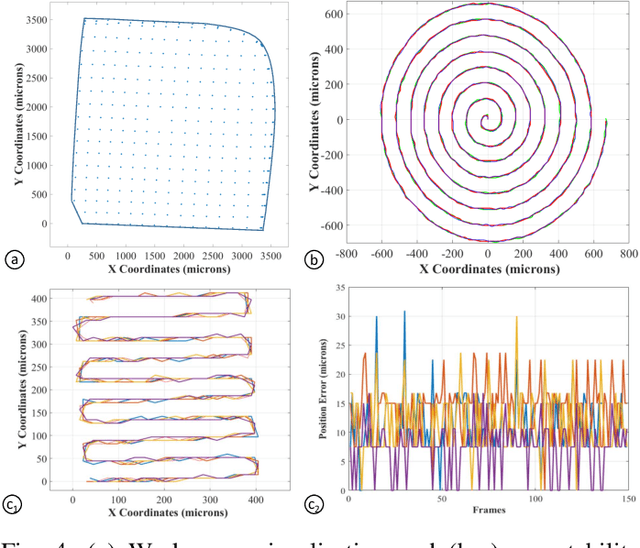
Objective: Probe-based confocal endomicroscopy is an emerging high-magnification optical imaging technique that provides in vivo and in situ cellular-level imaging for real-time assessment of tissue pathology. Endomicroscopy could potentially be used for intraoperative surgical guidance, but it is challenging to assess a surgical site using individual microscopic images due to the limited field-of-view and difficulties associated with manually manipulating the probe. Methods: In this paper, a novel robotic device for large-area endomicroscopy imaging is proposed, demonstrating a rapid, but highly accurate, scanning mechanism with image-based motion control which is able to generate histology-like endomicroscopy mosaics. The device also includes, for the first time in robotic-assisted endomicroscopy, the capability to ablate tissue without the need for an additional tool. Results: The device achieves pre-programmed trajectories with positioning accuracy of less than 30 um, while the image-based approach demonstrated that it can suppress random motion disturbances up to 1.25 mm/s. Mosaics are presented from a range of ex vivo human and animal tissues, over areas of more than 3 mm^2, scanned in approximate 10 seconds. Conclusion: This work demonstrates the potential of the proposed instrument to generate large-area, high-resolution microscopic images for intraoperative tissue identification and margin assessment. Significance: This approach presents an important alternative to current histology techniques, significantly reducing the tissue assessment time, while simultaneously providing the capability to mark and ablate suspicious areas intraoperatively.