 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeMHR: Momentum Human Rig
Nov 19, 2025We present MHR, a parametric human body model that combines the decoupled skeleton/shape paradigm of ATLAS with a flexible, modern rig and pose corrective system inspired by the Momentum library. Our model enables expressive, anatomically plausible human animation, supporting non-linear pose correctives, and is designed for robust integration in AR/VR and graphics pipelines.
RoHM: Robust Human Motion Reconstruction via Diffusion
Jan 16, 2024



We propose RoHM, an approach for robust 3D human motion reconstruction from monocular RGB(-D) videos in the presence of noise and occlusions. Most previous approaches either train neural networks to directly regress motion in 3D or learn data-driven motion priors and combine them with optimization at test time. The former do not recover globally coherent motion and fail under occlusions; the latter are time-consuming, prone to local minima, and require manual tuning. To overcome these shortcomings, we exploit the iterative, denoising nature of diffusion models. RoHM is a novel diffusion-based motion model that, conditioned on noisy and occluded input data, reconstructs complete, plausible motions in consistent global coordinates. Given the complexity of the problem -- requiring one to address different tasks (denoising and infilling) in different solution spaces (local and global motion) -- we decompose it into two sub-tasks and learn two models, one for global trajectory and one for local motion. To capture the correlations between the two, we then introduce a novel conditioning module, combining it with an iterative inference scheme. We apply RoHM to a variety of tasks -- from motion reconstruction and denoising to spatial and temporal infilling. Extensive experiments on three popular datasets show that our method outperforms state-of-the-art approaches qualitatively and quantitatively, while being faster at test time. The code will be available at https://sanweiliti.github.io/ROHM/ROHM.html.
Virtual Elastic Objects
Jan 12, 2022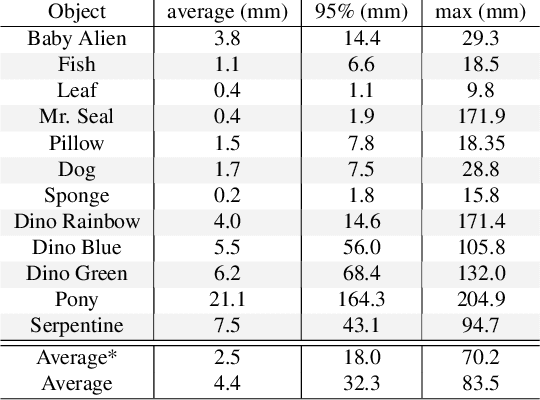

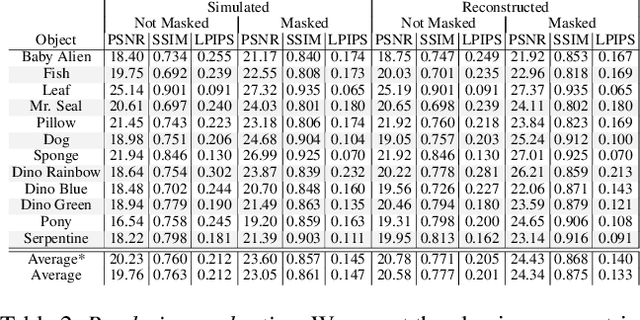
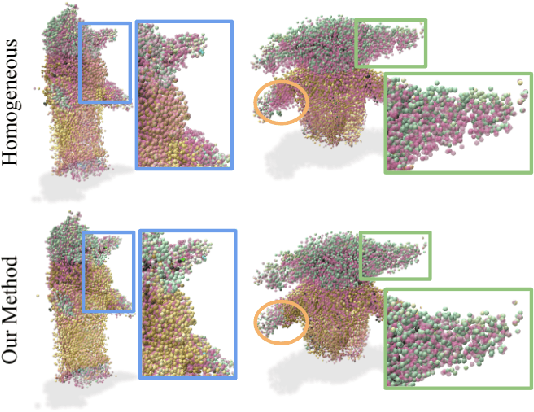
We present Virtual Elastic Objects (VEOs): virtual objects that not only look like their real-world counterparts but also behave like them, even when subject to novel interactions. Achieving this presents multiple challenges: not only do objects have to be captured including the physical forces acting on them, then faithfully reconstructed and rendered, but also plausible material parameters found and simulated. To create VEOs, we built a multi-view capture system that captures objects under the influence of a compressed air stream. Building on recent advances in model-free, dynamic Neural Radiance Fields, we reconstruct the objects and corresponding deformation fields. We propose to use a differentiable, particle-based simulator to use these deformation fields to find representative material parameters, which enable us to run new simulations. To render simulated objects, we devise a method for integrating the simulation results with Neural Radiance Fields. The resulting method is applicable to a wide range of scenarios: it can handle objects composed of inhomogeneous material, with very different shapes, and it can simulate interactions with other virtual objects. We present our results using a newly collected dataset of 12 objects under a variety of force fields, which will be shared with the community.