 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeQuaffure: Real-Time Quasi-Static Neural Hair Simulation
Dec 13, 2024



Realistic hair motion is crucial for high-quality avatars, but it is often limited by the computational resources available for real-time applications. To address this challenge, we propose a novel neural approach to predict physically plausible hair deformations that generalizes to various body poses, shapes, and hairstyles. Our model is trained using a self-supervised loss, eliminating the need for expensive data generation and storage. We demonstrate our method's effectiveness through numerous results across a wide range of pose and shape variations, showcasing its robust generalization capabilities and temporally smooth results. Our approach is highly suitable for real-time applications with an inference time of only a few milliseconds on consumer hardware and its ability to scale to predicting the drape of 1000 grooms in 0.3 seconds.
DiffAvatar: Simulation-Ready Garment Optimization with Differentiable Simulation
Nov 20, 2023



The realism of digital avatars is crucial in enabling telepresence applications with self-expression and customization. A key aspect of this realism originates from the physical accuracy of both a true-to-life body shape and clothing. While physical simulations can produce high-quality, realistic motions for clothed humans, they require precise estimation of body shape and high-quality garment assets with associated physical parameters for cloth simulations. However, manually creating these assets and calibrating their parameters is labor-intensive and requires specialized expertise. To address this gap, we propose DiffAvatar, a novel approach that performs body and garment co-optimization using differentiable simulation. By integrating physical simulation into the optimization loop and accounting for the complex nonlinear behavior of cloth and its intricate interaction with the body, our framework recovers body and garment geometry and extracts important material parameters in a physically plausible way. Our experiments demonstrate that our approach generates realistic clothing and body shape that can be easily used in downstream applications.
Virtual Elastic Objects
Jan 12, 2022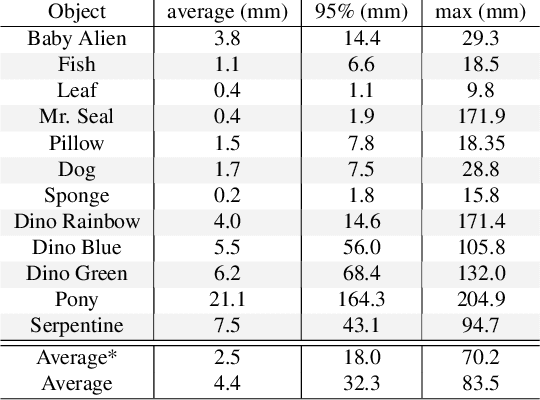

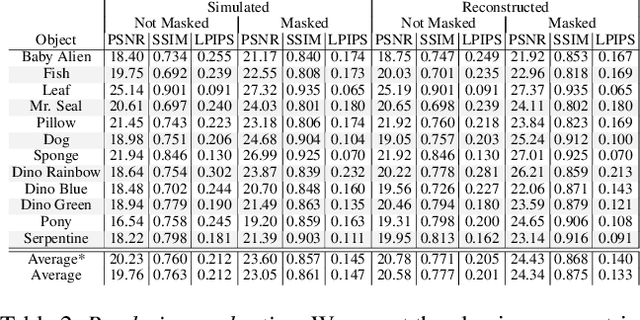
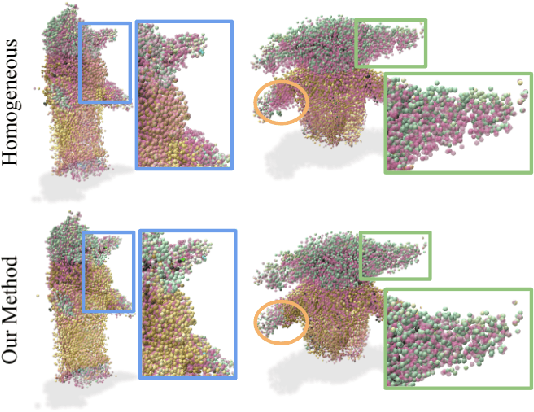
We present Virtual Elastic Objects (VEOs): virtual objects that not only look like their real-world counterparts but also behave like them, even when subject to novel interactions. Achieving this presents multiple challenges: not only do objects have to be captured including the physical forces acting on them, then faithfully reconstructed and rendered, but also plausible material parameters found and simulated. To create VEOs, we built a multi-view capture system that captures objects under the influence of a compressed air stream. Building on recent advances in model-free, dynamic Neural Radiance Fields, we reconstruct the objects and corresponding deformation fields. We propose to use a differentiable, particle-based simulator to use these deformation fields to find representative material parameters, which enable us to run new simulations. To render simulated objects, we devise a method for integrating the simulation results with Neural Radiance Fields. The resulting method is applicable to a wide range of scenarios: it can handle objects composed of inhomogeneous material, with very different shapes, and it can simulate interactions with other virtual objects. We present our results using a newly collected dataset of 12 objects under a variety of force fields, which will be shared with the community.