 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeSingle-View Rolling-Shutter SfM
Mar 12, 2026Rolling-shutter (RS) cameras are ubiquitous, but RS SfM (structure-from-motion) has not been fully solved yet. This work suggests an approach to remedy this: We characterize RS single-view geometry of observed world points or lines. Exploiting this geometry, we describe which motion and scene parameters can be recovered from a single RS image and systematically derive minimal reconstruction problems. We evaluate several representative cases with proof-of-concept solvers, highlighting both feasibility and practical limitations.
Minimal Solvers for Full DoF Motion Estimation from Asynchronous Tracks
Aug 24, 2025We address the problem of estimating both translational and angular velocity of a camera from asynchronous point tracks, a formulation relevant to rolling shutter and event cameras. Since the original problem is non-polynomial, we propose a polynomial approximation, classify the resulting minimal problems, and determine their algebraic degrees. Furthermore, we develop minimal solvers for several problems with low degrees and evaluate them on synthetic and real datasets. The code will be made publicly available.
Efficient Solution of Point-Line Absolute Pose
Apr 25, 2024We revisit certain problems of pose estimation based on 3D--2D correspondences between features which may be points or lines. Specifically, we address the two previously-studied minimal problems of estimating camera extrinsics from $p \in \{ 1, 2 \}$ point--point correspondences and $l=3-p$ line--line correspondences. To the best of our knowledge, all of the previously-known practical solutions to these problems required computing the roots of degree $\ge 4$ (univariate) polynomials when $p=2$, or degree $\ge 8$ polynomials when $p=1.$ We describe and implement two elementary solutions which reduce the degrees of the needed polynomials from $4$ to $2$ and from $8$ to $4$, respectively. We show experimentally that the resulting solvers are numerically stable and fast: when compared to the previous state-of-the art, we may obtain nearly an order of magnitude speedup. The code is available at \url{https://github.com/petrhruby97/efficient\_absolute}
Handbook on Leveraging Lines for Two-View Relative Pose Estimation
Sep 27, 2023



We propose an approach for estimating the relative pose between calibrated image pairs by jointly exploiting points, lines, and their coincidences in a hybrid manner. We investigate all possible configurations where these data modalities can be used together and review the minimal solvers available in the literature. Our hybrid framework combines the advantages of all configurations, enabling robust and accurate estimation in challenging environments. In addition, we design a method for jointly estimating multiple vanishing point correspondences in two images, and a bundle adjustment that considers all relevant data modalities. Experiments on various indoor and outdoor datasets show that our approach outperforms point-based methods, improving AUC@10$^\circ$ by 1-7 points while running at comparable speeds. The source code of the solvers and hybrid framework will be made public.
Vanishing Point Estimation in Uncalibrated Images with Prior Gravity Direction
Aug 21, 2023



We tackle the problem of estimating a Manhattan frame, i.e. three orthogonal vanishing points, and the unknown focal length of the camera, leveraging a prior vertical direction. The direction can come from an Inertial Measurement Unit that is a standard component of recent consumer devices, e.g., smartphones. We provide an exhaustive analysis of minimal line configurations and derive two new 2-line solvers, one of which does not suffer from singularities affecting existing solvers. Additionally, we design a new non-minimal method, running on an arbitrary number of lines, to boost the performance in local optimization. Combining all solvers in a hybrid robust estimator, our method achieves increased accuracy even with a rough prior. Experiments on synthetic and real-world datasets demonstrate the superior accuracy of our method compared to the state of the art, while having comparable runtimes. We further demonstrate the applicability of our solvers for relative rotation estimation. The code is available at https://github.com/cvg/VP-Estimation-with-Prior-Gravity.
AffineGlue: Joint Matching and Robust Estimation
Jul 28, 2023



We propose AffineGlue, a method for joint two-view feature matching and robust estimation that reduces the combinatorial complexity of the problem by employing single-point minimal solvers. AffineGlue selects potential matches from one-to-many correspondences to estimate minimal models. Guided matching is then used to find matches consistent with the model, suffering less from the ambiguities of one-to-one matches. Moreover, we derive a new minimal solver for homography estimation, requiring only a single affine correspondence (AC) and a gravity prior. Furthermore, we train a neural network to reject ACs that are unlikely to lead to a good model. AffineGlue is superior to the SOTA on real-world datasets, even when assuming that the gravity direction points downwards. On PhotoTourism, the AUC@10{\deg} score is improved by 6.6 points compared to the SOTA. On ScanNet, AffineGlue makes SuperPoint and SuperGlue achieve similar accuracy as the detector-free LoFTR.
Learning to Solve Hard Minimal Problems
Dec 06, 2021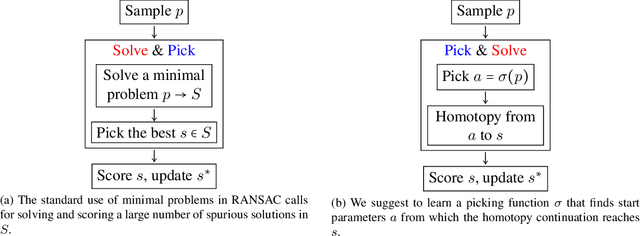
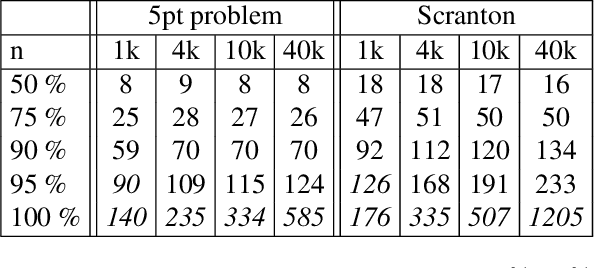
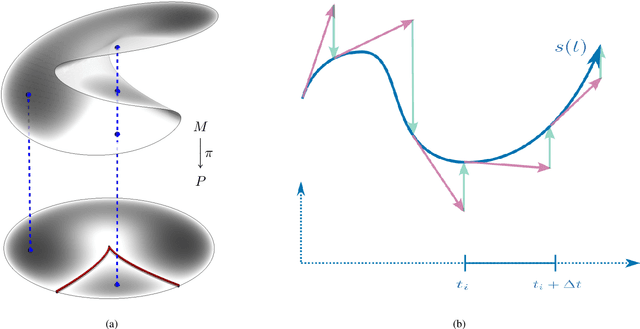
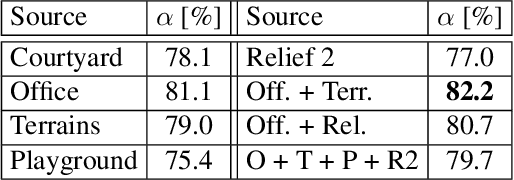
We present an approach to solving hard geometric optimization problems in the RANSAC framework. The hard minimal problems arise from relaxing the original geometric optimization problem into a minimal problem with many spurious solutions. Our approach avoids computing large numbers of spurious solutions. We design a learning strategy for selecting a starting problem-solution pair that can be numerically continued to the problem and the solution of interest. We demonstrate our approach by developing a RANSAC solver for the problem of computing the relative pose of three calibrated cameras, via a minimal relaxation using four points in each view. On average, we can solve a single problem in under 70 $\mu s.$ We also benchmark and study our engineering choices on the very familiar problem of computing the relative pose of two calibrated cameras, via the minimal case of five points in two views.
Reconstructing Small 3D Objects in front of a Textured Background
May 24, 2021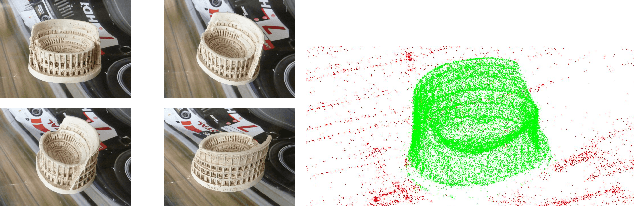
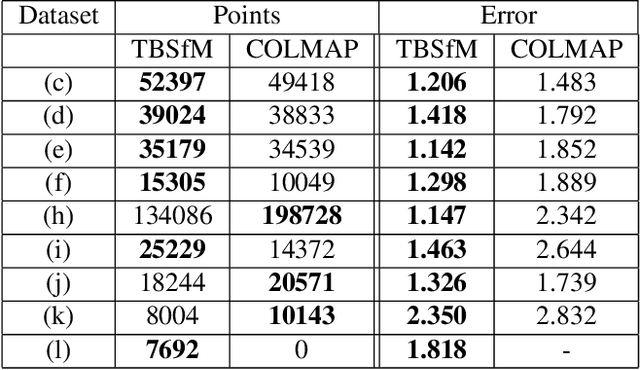
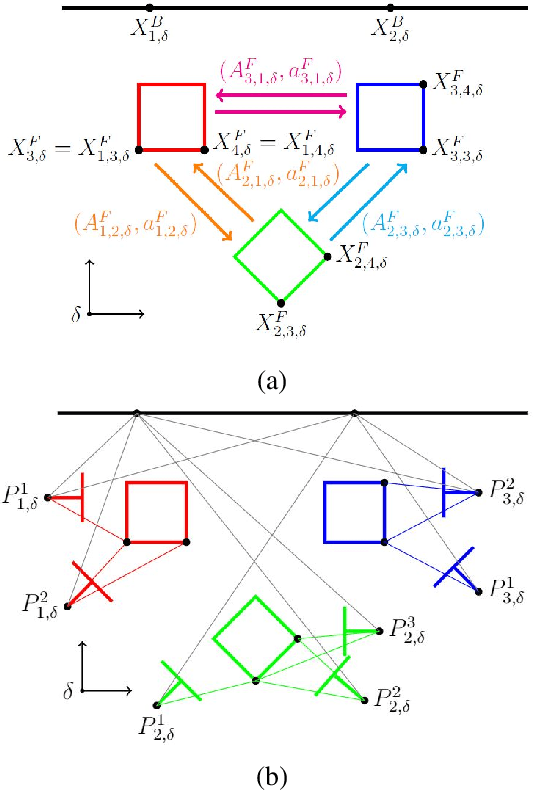
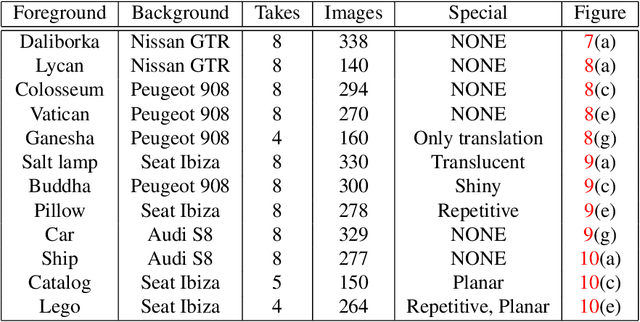
We present a technique for a complete 3D reconstruction of small objects moving in front of a textured background. It is a particular variation of multibody structure from motion, which specializes to two objects only. The scene is captured in several static configurations between which the relative pose of the two objects may change. We reconstruct every static configuration individually and segment the points locally by finding multiple poses of cameras that capture the scene's other configurations. Then, the local segmentation results are combined, and the reconstructions are merged into the resulting model of the scene. In experiments with real artifacts, we show that our approach has practical advantages when reconstructing 3D objects from all sides. In this setting, our method outperforms the state-of-the-art. We integrate our method into the state of the art 3D reconstruction pipeline COLMAP.