 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeHeatMat: Simulation of City Material Impact on Urban Heat Island Effect
Jan 30, 2026The Urban Heat Island (UHI) effect, defined as a significant increase in temperature in urban environments compared to surrounding areas, is difficult to study in real cities using sensor data (satellites or in-situ stations) due to their coarse spatial and temporal resolution. Among the factors contributing to this effect are the properties of urban materials, which differ from those in rural areas. To analyze their individual impact and to test new material configurations, a high-resolution simulation at the city scale is required. Estimating the current materials used in a city, including those on building facades, is also challenging. We propose HeatMat, an approach to analyze at high resolution the individual impact of urban materials on the UHI effect in a real city, relying only on open data. We estimate building materials using street-view images and a pre-trained vision-language model (VLM) to supplement existing OpenStreetMap data, which describes the 2D geometry and features of buildings. We further encode this information into a set of 2D maps that represent the city's vertical structure and material characteristics. These maps serve as inputs for our 2.5D simulator, which models coupled heat transfers and enables random-access surface temperature estimation at multiple resolutions, reaching an x20 speedup compared to an equivalent simulation in 3D.
Sparse minimum Redundancy Maximum Relevance for feature selection
Aug 26, 2025We propose a feature screening method that integrates both feature-feature and feature-target relationships. Inactive features are identified via a penalized minimum Redundancy Maximum Relevance (mRMR) procedure, which is the continuous version of the classic mRMR penalized by a non-convex regularizer, and where the parameters estimated as zero coefficients represent the set of inactive features. We establish the conditions under which zero coefficients are correctly identified to guarantee accurate recovery of inactive features. We introduce a multi-stage procedure based on the knockoff filter enabling the penalized mRMR to discard inactive features while controlling the false discovery rate (FDR). Our method performs comparably to HSIC-LASSO but is more conservative in the number of selected features. It only requires setting an FDR threshold, rather than specifying the number of features to retain. The effectiveness of the method is illustrated through simulations and real-world datasets. The code to reproduce this work is available on the following GitHub: https://github.com/PeterJackNaylor/SmRMR.
Off to new Shores: A Dataset & Benchmark for (near-)coastal Flood Inundation Forecasting
Sep 27, 2024



Floods are among the most common and devastating natural hazards, imposing immense costs on our society and economy due to their disastrous consequences. Recent progress in weather prediction and spaceborne flood mapping demonstrated the feasibility of anticipating extreme events and reliably detecting their catastrophic effects afterwards. However, these efforts are rarely linked to one another and there is a critical lack of datasets and benchmarks to enable the direct forecasting of flood extent. To resolve this issue, we curate a novel dataset enabling a timely prediction of flood extent. Furthermore, we provide a representative evaluation of state-of-the-art methods, structured into two benchmark tracks for forecasting flood inundation maps i) in general and ii) focused on coastal regions. Altogether, our dataset and benchmark provide a comprehensive platform for evaluating flood forecasts, enabling future solutions for this critical challenge. Data, code & models are shared at https://github.com/Multihuntr/GFF under a CC0 license.
Implicit Assimilation of Sparse In Situ Data for Dense & Global Storm Surge Forecasting
Apr 05, 2024



Hurricanes and coastal floods are among the most disastrous natural hazards. Both are intimately related to storm surges, as their causes and effects, respectively. However, the short-term forecasting of storm surges has proven challenging, especially when targeting previously unseen locations or sites without tidal gauges. Furthermore, recent work improved short and medium-term weather forecasting but the handling of raw unassimilated data remains non-trivial. In this paper, we tackle both challenges and demonstrate that neural networks can implicitly assimilate sparse in situ tide gauge data with coarse ocean state reanalysis in order to forecast storm surges. We curate a global dataset to learn and validate the dense prediction of storm surges, building on preceding efforts. Other than prior work limited to known gauges, our approach extends to ungauged sites, paving the way for global storm surge forecasting.
Implicit neural representation for change detection
Jul 28, 2023Detecting changes that occurred in a pair of 3D airborne LiDAR point clouds, acquired at two different times over the same geographical area, is a challenging task because of unmatching spatial supports and acquisition system noise. Most recent attempts to detect changes on point clouds are based on supervised methods, which require large labelled data unavailable in real-world applications. To address these issues, we propose an unsupervised approach that comprises two components: Neural Field (NF) for continuous shape reconstruction and a Gaussian Mixture Model for categorising changes. NF offer a grid-agnostic representation to encode bi-temporal point clouds with unmatched spatial support that can be regularised to increase high-frequency details and reduce noise. The reconstructions at each timestamp are compared at arbitrary spatial scales, leading to a significant increase in detection capabilities. We apply our method to a benchmark dataset of simulated LiDAR point clouds for urban sprawling. The dataset offers different challenging scenarios with different resolutions, input modalities and noise levels, allowing a multi-scenario comparison of our method with the current state-of-the-art. We boast the previous methods on this dataset by a 10% margin in intersection over union metric. In addition, we apply our methods to a real-world scenario to identify illegal excavation (looting) of archaeological sites and confirm that they match findings from field experts.
Optimal Transport for Change Detection on LiDAR Point Clouds
Feb 14, 2023The detection of changes occurring in multi-temporal remote sensing data plays a crucial role in monitoring several aspects of real life, such as disasters, deforestation, and urban planning. In the latter context, identifying both newly built and demolished buildings is essential to help landscape and city managers to promote sustainable development. While the use of airborne LiDAR point clouds has become widespread in urban change detection, the most common approaches require the transformation of a point cloud into a regular grid of interpolated height measurements, i.e. Digital Elevation Model (DEM). However, the DEM's interpolation step causes an information loss related to the height of the objects, affecting the detection capability of building changes, where the high resolution of LiDAR point clouds in the third dimension would be the most beneficial. Notwithstanding recent attempts to detect changes directly on point clouds using either a distance-based computation method or a semantic segmentation pre-processing step, only the M3C2 distance computation-based approach can identify both positive and negative changes, which is of paramount importance in urban planning. Motivated by the previous arguments, we introduce a principled change detection pipeline, based on optimal transport, capable of distinguishing between newly built buildings (positive changes) and demolished ones (negative changes). In this work, we propose to use unbalanced optimal transport to cope with the creation and destruction of mass related to building changes occurring in a bi-temporal pair of LiDAR point clouds. We demonstrate the efficacy of our approach on the only publicly available airborne LiDAR dataset for change detection by showing superior performance over the M3C2 and the previous optimal transport-based method presented by Nicolas Courty et al.at IGARSS 2016.
Scale dependant layer for self-supervised nuclei encoding
Jul 22, 2022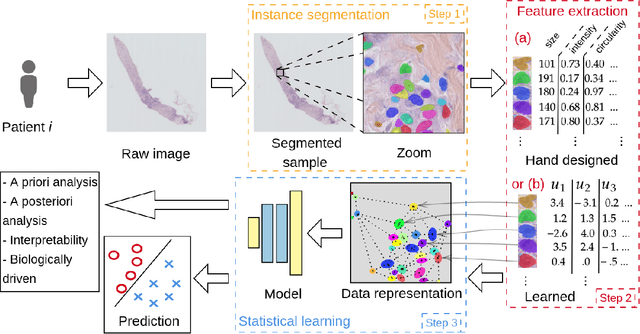


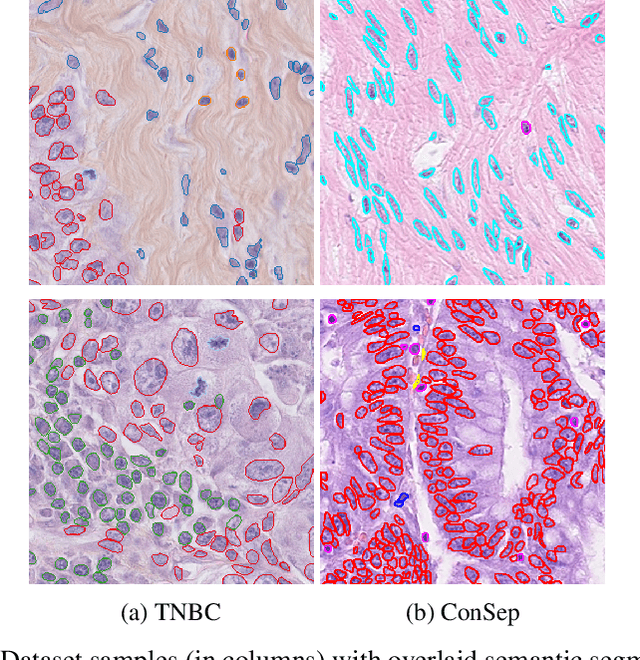
Recent developments in self-supervised learning give us the possibility to further reduce human intervention in multi-step pipelines where the focus evolves around particular objects of interest. In the present paper, the focus lays in the nuclei in histopathology images. In particular we aim at extracting cellular information in an unsupervised manner for a downstream task. As nuclei present themselves in a variety of sizes, we propose a new Scale-dependant convolutional layer to bypass scaling issues when resizing nuclei. On three nuclei datasets, we benchmark the following methods: handcrafted, pre-trained ResNet, supervised ResNet and self-supervised features. We show that the proposed convolution layer boosts performance and that this layer combined with Barlows-Twins allows for better nuclei encoding compared to the supervised paradigm in the low sample setting and outperforms all other proposed unsupervised methods. In addition, we extend the existing TNBC dataset to incorporate nuclei class annotation in order to enrich and publicly release a small sample setting dataset for nuclei segmentation and classification.