 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeCritic in the Loop: A Tri-System VLA Framework for Robust Long-Horizon Manipulation
Mar 05, 2026Balancing high-level semantic reasoning with low-level reactive control remains a core challenge in visual robotic manipulation. While Vision-Language Models (VLMs) excel at cognitive planning, their inference latency precludes real-time execution. Conversely, fast Vision-Language-Action (VLA) models often lack the semantic depth required for complex, long-horizon tasks. To bridge this gap, we introduce Critic in the Loop, an adaptive hierarchical framework driven by dynamic VLM-Expert scheduling. At its core is a bionic Tri-System architecture comprising a VLM brain for global reasoning, a VLA cerebellum for reactive execution, and a lightweight visual Critic. By continuously monitoring the workspace, the Critic dynamically routes control authority. It sustains rapid closed-loop execution via the VLA for routine subtasks, and adaptively triggers the VLM for replanning upon detecting execution anomalies such as task stagnation or failures. Furthermore, our architecture seamlessly integrates human-inspired rules to intuitively break infinite retry loops. This visually-grounded scheduling minimizes expensive VLM queries, while substantially enhancing system robustness and autonomy in out-of-distribution (OOD) scenarios. Comprehensive experiments on challenging, long-horizon manipulation benchmarks reveal that our approach achieves state-of-the-art performance.
Viewpoint Matters: Dynamically Optimizing Viewpoints with Masked Autoencoder for Visual Manipulation
Feb 04, 2026Robotic manipulation continues to be a challenge, and imitation learning (IL) enables robots to learn tasks from expert demonstrations. Current IL methods typically rely on fixed camera setups, where cameras are manually positioned in static locations, imposing significant limitations on adaptability and coverage. Inspired by human active perception, where humans dynamically adjust their viewpoint to capture the most relevant and least noisy information, we propose MAE-Select, a novel framework for active viewpoint selection in single-camera robotic systems. MAE-Select fully leverages pre-trained multi-view masked autoencoder representations and dynamically selects the next most informative viewpoint at each time chunk without requiring labeled viewpoints. Extensive experiments demonstrate that MAE-Select improves the capabilities of single-camera systems and, in some cases, even surpasses multi-camera setups. The project will be available at https://mae-select.github.io.
FSAG: Enhancing Human-to-Dexterous-Hand Finger-Specific Affordance Grounding via Diffusion Models
Jan 13, 2026Dexterous grasp synthesis remains a central challenge: the high dimensionality and kinematic diversity of multi-fingered hands prevent direct transfer of algorithms developed for parallel-jaw grippers. Existing approaches typically depend on large, hardware-specific grasp datasets collected in simulation or through costly real-world trials, hindering scalability as new dexterous hand designs emerge. To this end, we propose a data-efficient framework, which is designed to bypass robot grasp data collection by exploiting the rich, object-centric semantic priors latent in pretrained generative diffusion models. Temporally aligned and fine-grained grasp affordances are extracted from raw human video demonstrations and fused with 3D scene geometry from depth images to infer semantically grounded contact targets. A kinematics-aware retargeting module then maps these affordance representations to diverse dexterous hands without per-hand retraining. The resulting system produces stable, functionally appropriate multi-contact grasps that remain reliably successful across common objects and tools, while exhibiting strong generalization across previously unseen object instances within a category, pose variations, and multiple hand embodiments. This work (i) introduces a semantic affordance extraction pipeline leveraging vision-language generative priors for dexterous grasping, (ii) demonstrates cross-hand generalization without constructing hardware-specific grasp datasets, and (iii) establishes that a single depth modality suffices for high-performance grasp synthesis when coupled with foundation-model semantics. Our results highlight a path toward scalable, hardware-agnostic dexterous manipulation driven by human demonstrations and pretrained generative models.
FoAM: Foresight-Augmented Multi-Task Imitation Policy for Robotic Manipulation
Sep 29, 2024



Multi-task imitation learning (MTIL) has shown significant potential in robotic manipulation by enabling agents to perform various tasks using a unified policy. This simplifies the policy deployment and enhances the agent's adaptability across different contexts. However, key challenges remain, such as maintaining action reliability (e.g., avoiding abnormal action sequences that deviate from nominal task trajectories), distinguishing between similar tasks, and generalizing to unseen scenarios. To address these challenges, we introduce the Foresight-Augmented Manipulation Policy (FoAM), an innovative MTIL framework. FoAM not only learns to mimic expert actions but also predicts the visual outcomes of those actions to enhance decision-making. Additionally, it integrates multi-modal goal inputs, such as visual and language prompts, overcoming the limitations of single-conditioned policies. We evaluated FoAM across over 100 tasks in both simulation and real-world settings, demonstrating that it significantly improves IL policy performance, outperforming current state-of-the-art IL baselines by up to 41% in success rate. Furthermore, we released a simulation benchmark for robotic manipulation, featuring 10 task suites and over 80 challenging tasks designed for multi-task policy training and evaluation. See project homepage https://projFoAM.github.io/ for project details.
3-D Positioning and Resource Allocation for Multi-UAV Base Stations Under Blockage-Aware Channel Model
Nov 23, 2022



In this paper, we propose to deploy multiple unmanned aerial vehicle (UAV) mounted base stations to serve ground users in outdoor environments with obstacles. In particular, the geographic information is employed to capture the blockage effects for air-to-ground (A2G) links caused by buildings, and a realistic blockage-aware A2G channel model is proposed to characterize the continuous variation of the channels at different locations. Based on the proposed channel model, we formulate the joint optimization problem of UAV three-dimensional (3-D) positioning and resource allocation, by power allocation, user association, and subcarrier allocation, to maximize the minimum achievable rate among users. To solve this non-convex combinatorial programming problem, we introduce a penalty term to relax it and develop a suboptimal solution via a penalty-based double-loop iterative optimization framework. The inner loop solves the penalized problem by employing the block successive convex approximation (BSCA) technique, where the UAV positioning and resource allocation are alternately optimized in each iteration. The outer loop aims to obtain proper penalty multipliers to ensure the solution of the penalized problem converges to that of the original problem. Simulation results demonstrate the superiority of the proposed algorithm over other benchmark schemes in terms of the minimum achievable rate.
Joint 3-D Positioning and Power Allocation for UAV Relay Aided by Geographic Information
Oct 12, 2021
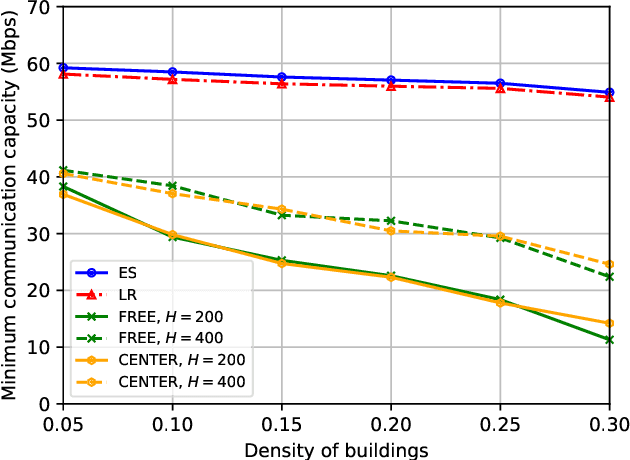
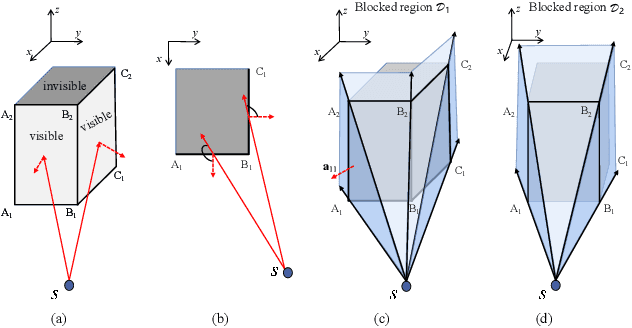

In this paper, we study to employ geographic information to address the blockage problem of air-to-ground links between UAV and terrestrial nodes. In particular, a UAV relay is deployed to establish communication links from a ground base station to multiple ground users. To improve communication capacity, we first model the blockage effect caused by buildings according to the three-dimensional (3-D) geographic information. Then, an optimization problem is formulated to maximize the minimum capacity among users by jointly optimizing the 3-D position and power allocation of the UAV relay, under the constraints of link capacity, maximum transmit power, and blockage. To solve this complex non-convex problem, a two-loop optimization framework is developed based on Lagrangian relaxation. The outer-loop aims to obtain proper Lagrangian multipliers to ensure the solution of the Lagrangian problem converge to the tightest upper bound on the original problem. The inner-loop solves the Lagrangian problem by applying the block coordinate descent (BCD) and successive convex approximation (SCA) techniques, where UAV 3-D positioning and power allocation are alternately optimized in each iteration. Simulation results confirm that the proposed solution significantly outperforms two benchmark schemes and achieves a performance close to the upper bound on the UAV relay system.
A Survey on Millimeter-Wave Beamforming Enabled UAV Communications and Networking
Apr 19, 2021



Unmanned aerial vehicles (UAVs) have found widespread commercial, civilian, and military applications. Wireless communication has always been one of the core technologies for UAV. However, the communication capacity is becoming a bottleneck for UAV to support more challenging application scenarios. The heavily-occupied sub-6 GHz frequency band is not sufficient to meet the ultra high-data-traffic requirements. The utilization of the millimeter-wave (mmWave) frequency bands is a promising direction for UAV communications, where large antenna arrays can be packed in a small area on the UAV to perform three-dimensional (3D) beamforming. On the other hand, UAVs serving as aerial access points or relays can significantly enhance the coverage and quality of service of the terrestrial mmWave cellular networks. In this paper, we provide a comprehensive survey on mmWave beamforming enabled UAV communications and networking. The technical potential of and challenges for mmWave-UAV communications are presented first. Then, we provide an overview on relevant mmWave antenna structures and channel modeling. Subsequently, the technologies and solutions for UAV-connected mmWave cellular networks and mmWave-UAV ad hoc networks are reviewed, respectively. Finally, we present open issues and promising directions for future research in mmWave beamforming enabled UAV communications and networking.