 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeUAV-Based Human Body Detector Selection and Fusion for Geolocated Saliency Map Generation
Aug 29, 2024



The problem of reliably detecting and geolocating objects of different classes in soft real-time is essential in many application areas, such as Search and Rescue performed using Unmanned Aerial Vehicles (UAVs). This research addresses the complementary problems of system contextual vision-based detector selection, allocation, and execution, in addition to the fusion of detection results from teams of UAVs for the purpose of accurately and reliably geolocating objects of interest in a timely manner. In an offline step, an application-independent evaluation of vision-based detectors from a system perspective is first performed. Based on this evaluation, the most appropriate algorithms for online object detection for each platform are selected automatically before a mission, taking into account a number of practical system considerations, such as the available communication links, video compression used, and the available computational resources. The detection results are fused using a method for building maps of salient locations which takes advantage of a novel sensor model for vision-based detections for both positive and negative observations. A number of simulated and real flight experiments are also presented, validating the proposed method.
Techniques for Measuring the Inferential Strength of Forgetting Policies
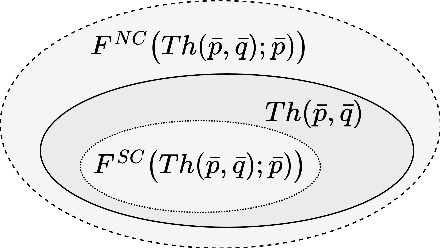
Apr 07, 2024The technique of forgetting in knowledge representation has been shown to be a powerful and useful knowledge engineering tool with widespread application. Yet, very little research has been done on how different policies of forgetting, or use of different forgetting operators, affects the inferential strength of the original theory. The goal of this paper is to define loss functions for measuring changes in inferential strength based on intuitions from model counting and probability theory. Properties of such loss measures are studied and a pragmatic knowledge engineering tool is proposed for computing loss measures using Problog. The paper includes a working methodology for studying and determining the strength of different forgetting policies, in addition to concrete examples showing how to apply the theoretical results using Problog. Although the focus is on forgetting, the results are much more general and should have wider application to other areas.
Dual Forgetting Operators in the Context of Weakest Sufficient and Strongest Necessary Conditions
May 12, 2023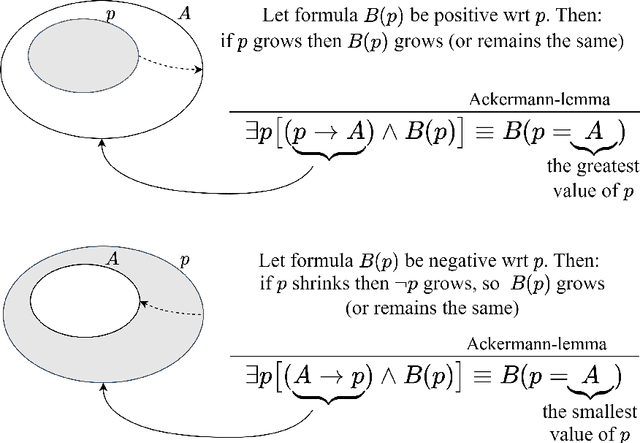
Forgetting is an important concept in knowledge representation and automated reasoning with widespread applications across a number of disciplines. A standard forgetting operator, characterized in [Lin and Reiter'94] in terms of model-theoretic semantics and primarily focusing on the propositional case, opened up a new research subarea. In this paper, a new operator called weak forgetting, dual to standard forgetting, is introduced and both together are shown to offer a new more uniform perspective on forgetting operators in general. Both the weak and standard forgetting operators are characterized in terms of entailment and inference, rather than a model theoretic semantics. This naturally leads to a useful algorithmic perspective based on quantifier elimination and the use of Ackermman's Lemma and its fixpoint generalization. The strong formal relationship between standard forgetting and strongest necessary conditions and weak forgetting and weakest sufficient conditions is also characterized quite naturally through the entailment-based, inferential perspective used. The framework used to characterize the dual forgetting operators is also generalized to the first-order case and includes useful algorithms for computing first-order forgetting operators in special cases. Practical examples are also included to show the importance of both weak and standard forgetting in modeling and representation.
Polygon Area Decomposition Using a Compactness Metric
Oct 08, 2021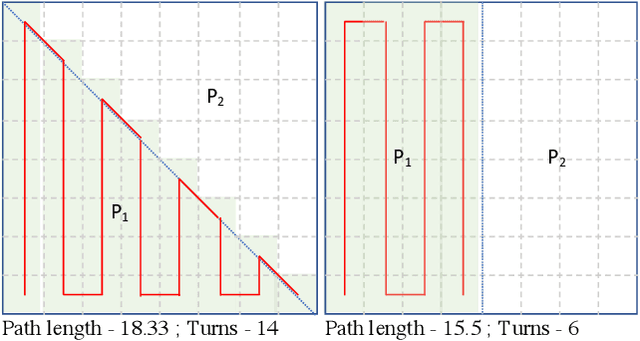
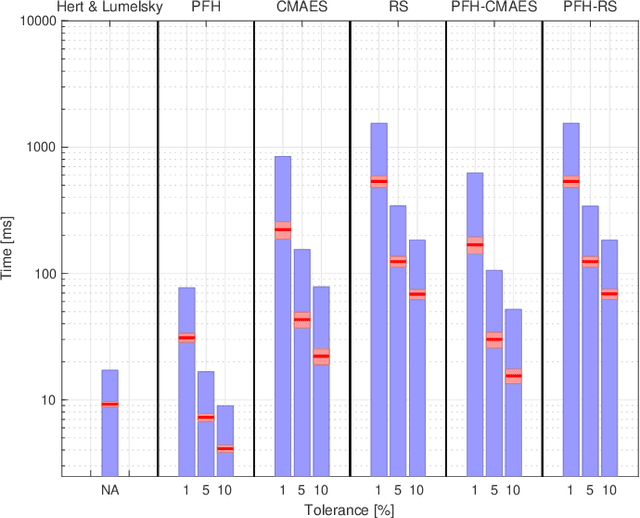
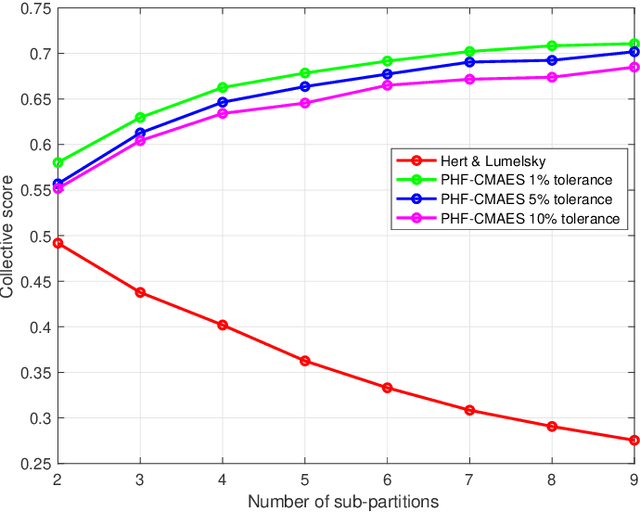
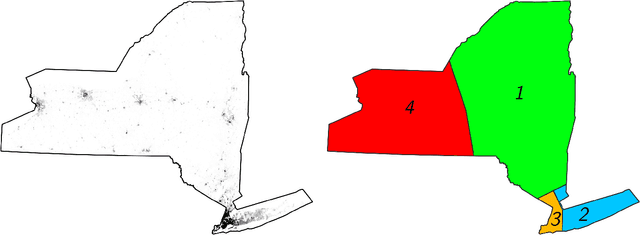
In this paper, we consider the problem of partitioning a polygon into a set of connected disjoint sub-polygons, each of which covers an area of a specific size. The work is motivated by terrain covering applications in robotics, where the goal is to find a set of efficient plans for a team of heterogeneous robots to cover a given area. Within this application, solving a polygon partitioning problem is an essential stepping stone. Unlike previous work, the problem formulation proposed in this paper also considers a compactness metric of the generated sub-polygons, in addition to the area size constraints. Maximizing the compactness of sub-polygons directly influences the optimality of any generated motion plans. Consequently, this increases the efficiency with which robotic tasks can be performed within each sub-region. The proposed problem representation is based on grid cell decomposition and a potential field model that allows for the use of standard optimization techniques. A new algorithm, the AreaDecompose algorithm, is proposed to solve this problem. The algorithm includes a number of existing and new optimization techniques combined with two post-processing methods. The approach has been evaluated on a set of randomly generated polygons which are then divided using different criteria and the results have been compared with a state-of-the-art algorithm. Results show that the proposed algorithm can efficiently divide polygon regions maximizing compactness of the resulting partitions, where the sub-polygon regions are on average up to 73% more compact in comparison to existing techniques.
Hastily Formed Knowledge Networks and Distributed Situation Awareness for Collaborative Robotics
Mar 25, 2021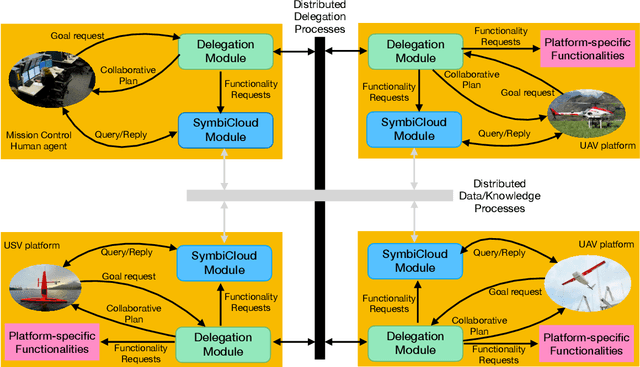
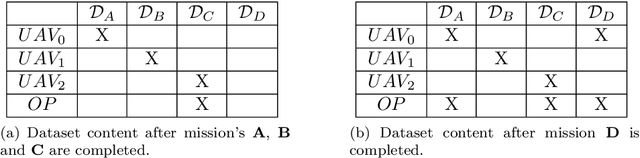
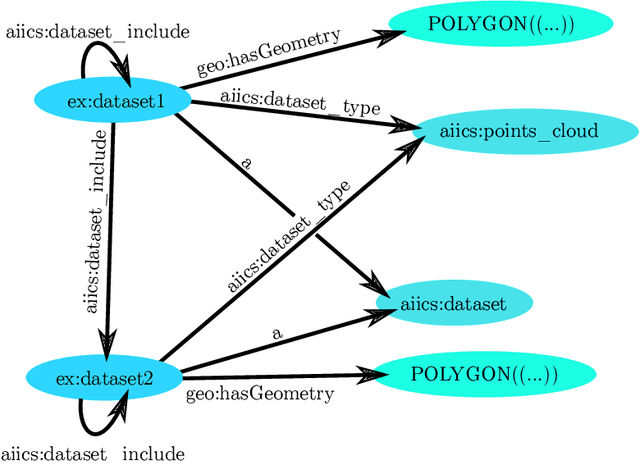
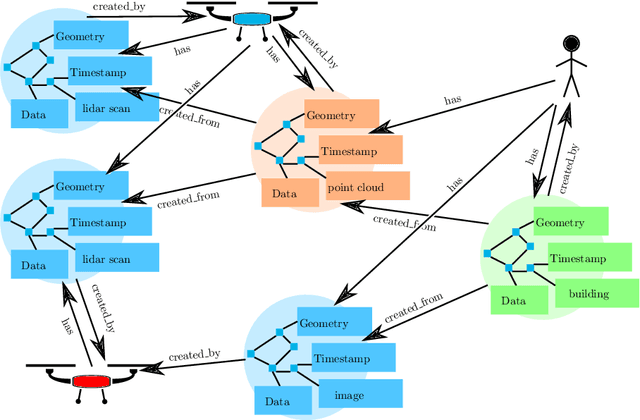
In the context of collaborative robotics, distributed situation awareness is essential for supporting collective intelligence in teams of robots and human agents where it can be used for both individual and collective decision support. This is particularly important in applications pertaining to emergency rescue and crisis management. During operational missions, data and knowledge is gathered incrementally and in different ways by heterogeneous robots and humans. We describe this as the creation of \emph{Hastily Formed Knowledge Networks} (HFKNs). The focus of this paper is the specification and prototyping of a general distributed system architecture that supports the creation of HFKNs by teams of robots and humans. The information collected ranges from low-level sensor data to high-level semantic knowledge, the latter represented in part as RDF Graphs. The framework includes a synchronization protocol and associated algorithms that allow for the automatic distribution and sharing of data and knowledge between agents. This is done through the distributed synchronization of RDF Graphs shared between agents. High-level semantic queries specified in SPARQL can be used by robots and humans alike to acquire both knowledge and data content from team members. The system is empirically validated and complexity results of the proposed algorithms are provided. Additionally, a field robotics case study is described, where a 3D mapping mission has been executed using several UAVs in a collaborative emergency rescue scenario while using the full HFKN Framework.
Real-Time Robotic Search using Hierarchical Spatial Point Processes
Mar 25, 2019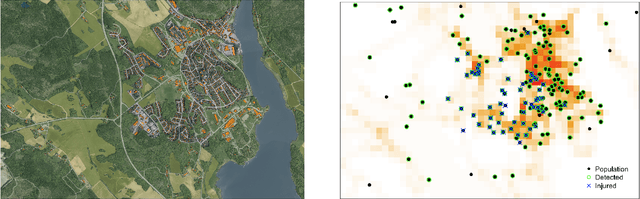
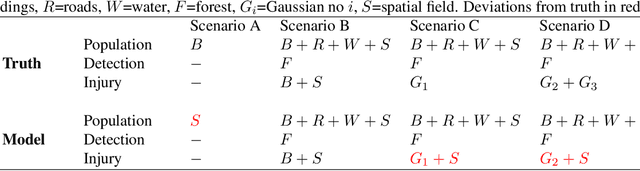
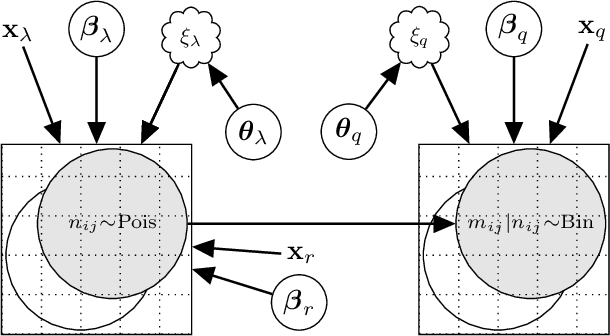

Aerial robots hold great potential for aiding Search and Rescue (SAR) efforts over large areas. Traditional approaches typically searches an area exhaustively, thereby ignoring that the density of victims varies based on predictable factors, such as the terrain, population density and the type of disaster. We present a probabilistic model to automate SAR planning, with explicit minimization of the expected time to discovery. The proposed model is a hierarchical spatial point process with three interacting spatial fields for i) the point patterns of persons in the area, ii) the probability of detecting persons and iii) the probability of injury. This structure allows inclusion of informative priors from e.g. geographic or cell phone traffic data, while falling back to latent Gaussian processes when priors are missing or inaccurate. To solve this problem in real-time, we propose a combination of fast approximate inference using Integrated Nested Laplace Approximation (INLA), and a novel Monte Carlo tree search tailored to the problem. Experiments using data simulated from real world GIS maps show that the framework outperforms traditional search strategies, and finds up to ten times more injured in the crucial first hours.