 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgePolygon Area Decomposition Using a Compactness Metric
Oct 08, 2021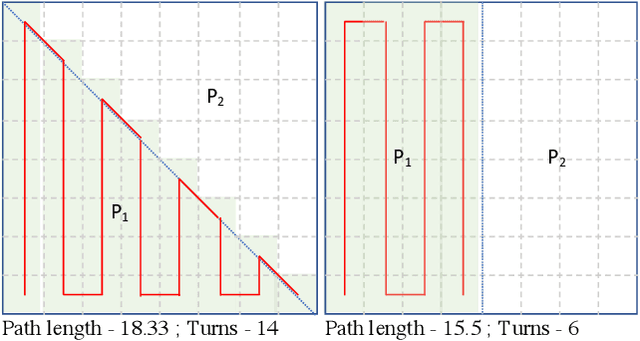
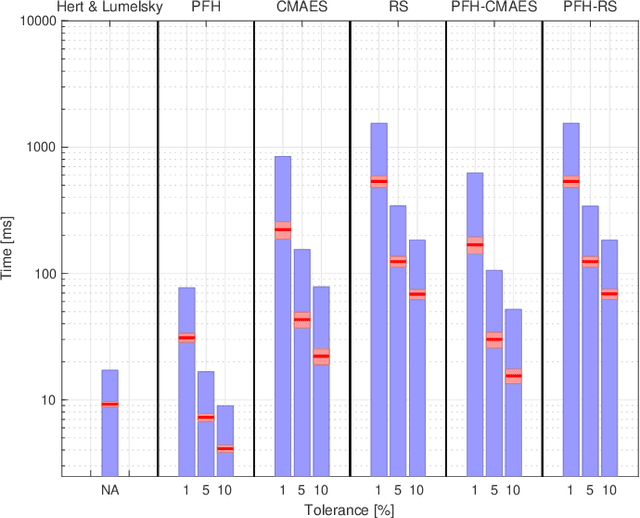
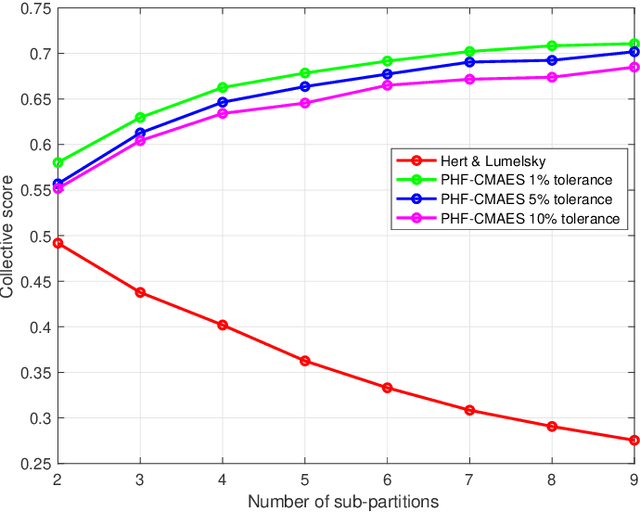
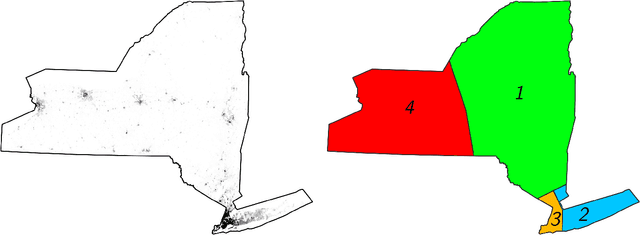
In this paper, we consider the problem of partitioning a polygon into a set of connected disjoint sub-polygons, each of which covers an area of a specific size. The work is motivated by terrain covering applications in robotics, where the goal is to find a set of efficient plans for a team of heterogeneous robots to cover a given area. Within this application, solving a polygon partitioning problem is an essential stepping stone. Unlike previous work, the problem formulation proposed in this paper also considers a compactness metric of the generated sub-polygons, in addition to the area size constraints. Maximizing the compactness of sub-polygons directly influences the optimality of any generated motion plans. Consequently, this increases the efficiency with which robotic tasks can be performed within each sub-region. The proposed problem representation is based on grid cell decomposition and a potential field model that allows for the use of standard optimization techniques. A new algorithm, the AreaDecompose algorithm, is proposed to solve this problem. The algorithm includes a number of existing and new optimization techniques combined with two post-processing methods. The approach has been evaluated on a set of randomly generated polygons which are then divided using different criteria and the results have been compared with a state-of-the-art algorithm. Results show that the proposed algorithm can efficiently divide polygon regions maximizing compactness of the resulting partitions, where the sub-polygon regions are on average up to 73% more compact in comparison to existing techniques.
Hastily Formed Knowledge Networks and Distributed Situation Awareness for Collaborative Robotics
Mar 25, 2021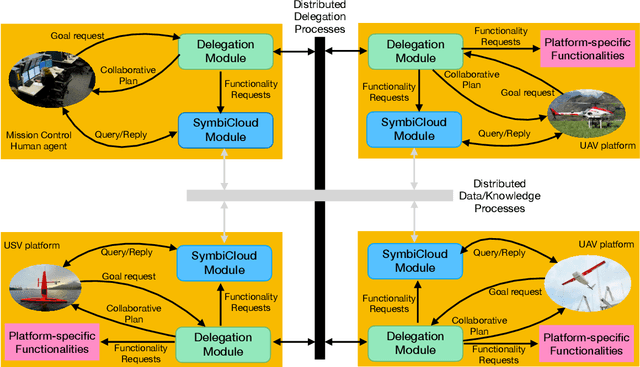
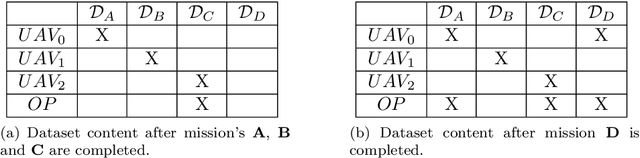
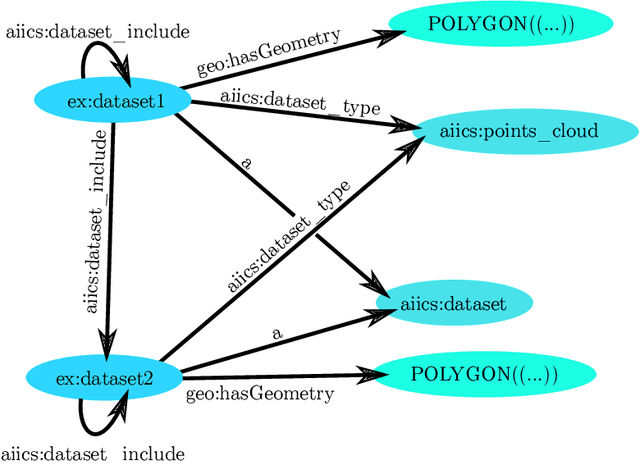
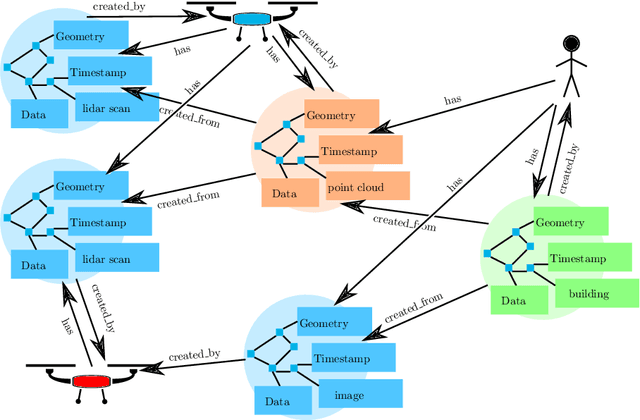
In the context of collaborative robotics, distributed situation awareness is essential for supporting collective intelligence in teams of robots and human agents where it can be used for both individual and collective decision support. This is particularly important in applications pertaining to emergency rescue and crisis management. During operational missions, data and knowledge is gathered incrementally and in different ways by heterogeneous robots and humans. We describe this as the creation of \emph{Hastily Formed Knowledge Networks} (HFKNs). The focus of this paper is the specification and prototyping of a general distributed system architecture that supports the creation of HFKNs by teams of robots and humans. The information collected ranges from low-level sensor data to high-level semantic knowledge, the latter represented in part as RDF Graphs. The framework includes a synchronization protocol and associated algorithms that allow for the automatic distribution and sharing of data and knowledge between agents. This is done through the distributed synchronization of RDF Graphs shared between agents. High-level semantic queries specified in SPARQL can be used by robots and humans alike to acquire both knowledge and data content from team members. The system is empirically validated and complexity results of the proposed algorithms are provided. Additionally, a field robotics case study is described, where a 3D mapping mission has been executed using several UAVs in a collaborative emergency rescue scenario while using the full HFKN Framework.