 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeEstimating the Diameter at Breast Height of Trees in a Forest With a Single 360 Camera
May 06, 2025Forest inventories rely on accurate measurements of the diameter at breast height (DBH) for ecological monitoring, resource management, and carbon accounting. While LiDAR-based techniques can achieve centimeter-level precision, they are cost-prohibitive and operationally complex. We present a low-cost alternative that only needs a consumer-grade 360 video camera. Our semi-automated pipeline comprises of (i) a dense point cloud reconstruction using Structure from Motion (SfM) photogrammetry software called Agisoft Metashape, (ii) semantic trunk segmentation by projecting Grounded Segment Anything (SAM) masks onto the 3D cloud, and (iii) a robust RANSAC-based technique to estimate cross section shape and DBH. We introduce an interactive visualization tool for inspecting segmented trees and their estimated DBH. On 61 acquisitions of 43 trees under a variety of conditions, our method attains median absolute relative errors of 5-9% with respect to "ground-truth" manual measurements. This is only 2-4% higher than LiDAR-based estimates, while employing a single 360 camera that costs orders of magnitude less, requires minimal setup, and is widely available.
TreeScope: An Agricultural Robotics Dataset for LiDAR-Based Mapping of Trees in Forests and Orchards
Oct 03, 2023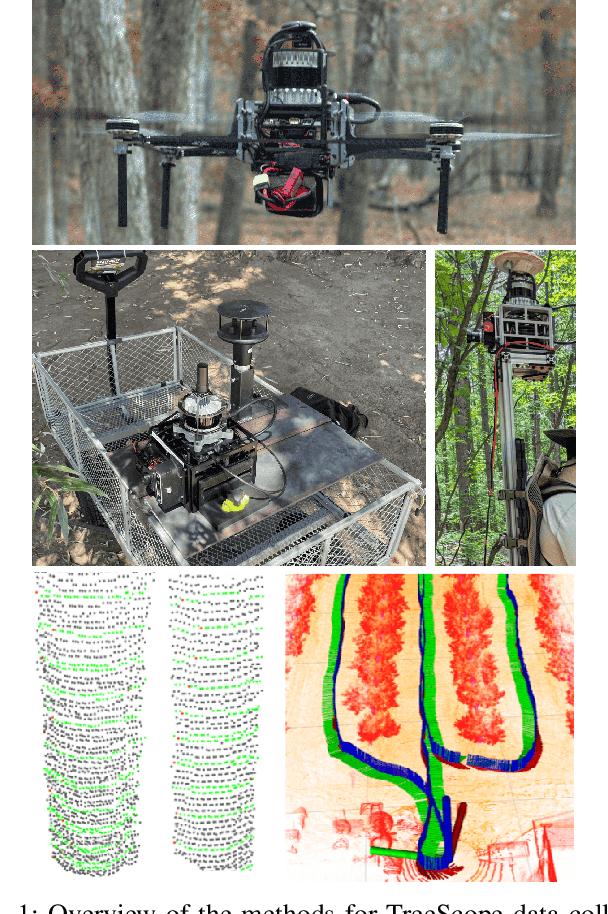
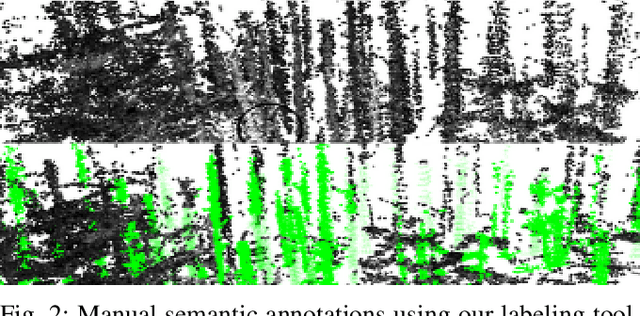
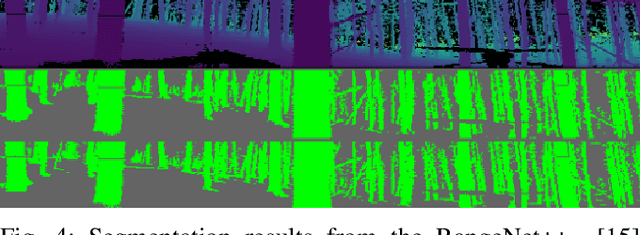
Data collection for forestry, timber, and agriculture currently relies on manual techniques which are labor-intensive and time-consuming. We seek to demonstrate that robotics offers improvements over these techniques and accelerate agricultural research, beginning with semantic segmentation and diameter estimation of trees in forests and orchards. We present TreeScope v1.0, the first robotics dataset for precision agriculture and forestry addressing the counting and mapping of trees in forestry and orchards. TreeScope provides LiDAR data from agricultural environments collected with robotics platforms, such as UAV and mobile robot platforms carried by vehicles and human operators. In the first release of this dataset, we provide ground-truth data with over 1,800 manually annotated semantic labels for tree stems and field-measured tree diameters. We share benchmark scripts for these tasks that researchers may use to evaluate the accuracy of their algorithms. Finally, we run our open-source diameter estimation and off-the-shelf semantic segmentation algorithms and share our baseline results.