 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeReview and Evaluation of Point-Cloud based Leaf Surface Reconstruction Methods for Agricultural Applications
Apr 02, 2026Accurate reconstruction of leaf surfaces from 3D point cloud is essential for agricultural applications such as phenotyping. However, real-world plant data (i.e., irregular 3D point cloud) are often complex to reconstruct plant parts accurately. A wide range of surface reconstruction methods has been proposed, including parametric, triangulation-based, implicit, and learning based approaches, yet their relative performance for leaf surface reconstruction remains insufficiently understood. In this work, we present a comparative study of nine representative surface reconstruction methods for leaf surfaces. We evaluate these methods on three publicly available datasets: LAST-STRAW, Pheno4D, and Crops3D - spanning diverse species, sensors, and sensing environments, ranging from clean high-resolution indoor scans to noisy low-resolution field settings. The analysis highlights the trade-offs between surface area estimation accuracy, smoothness, robustness to noise and missing data, and computational cost across different methods. These factors affect the cost and constraints of robotic hardware used in agricultural applications. Our results show that each method exhibits distinct advantages depending on application and resource constraints. The findings provide practical guidance for selecting surface reconstruction techniques for resource constrained robotic platforms.
Online Planning for Cooperative Air-Ground Robot Systems with Unknown Fuel Requirements
Jun 25, 2025We consider an online variant of the fuel-constrained UAV routing problem with a ground-based mobile refueling station (FCURP-MRS), where targets incur unknown fuel costs. We develop a two-phase solution: an offline heuristic-based planner computes initial UAV and UGV paths, and a novel online planning algorithm that dynamically adjusts rendezvous points based on real-time fuel consumption during target processing. Preliminary Gazebo simulations demonstrate the feasibility of our approach in maintaining UAV-UGV path validity, ensuring mission completion. Link to video: https://youtu.be/EmpVj-fjqNY
SARAL-Bot: Autonomous Robot for Strawberry Plant Care
Jun 07, 2025Strawberry farming demands intensive labor for monitoring and maintaining plant health. To address this, Team SARAL develops an autonomous robot for the 2024 ASABE Student Robotics Challenge, capable of navigation, unhealthy leaf detection, and removal. The system addresses labor shortages, reduces costs, and supports sustainable farming through vision-based plant assessment. This work demonstrates the potential of robotics to modernize strawberry cultivation and enable scalable, intelligent agricultural solutions.
Online Coverage Planning for an Autonomous Weed Mowing Robot with Curvature Constraints
Nov 19, 2021
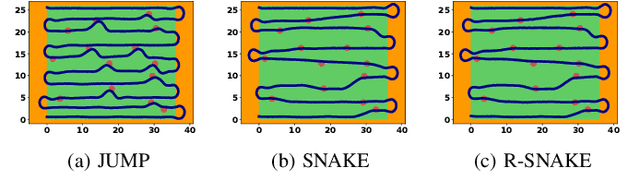
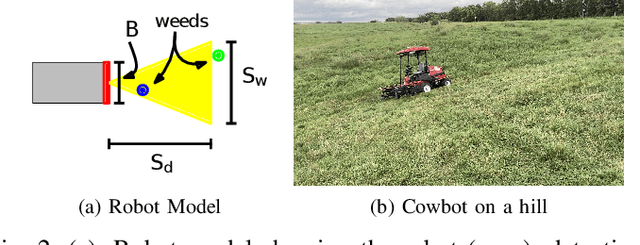
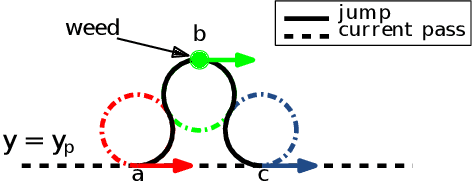
The land used for grazing cattle takes up about one-third of the land in the United States. These areas can be highly rugged. Yet, they need to be maintained to prevent weeds from taking over the nutritious grassland. This can be a daunting task especially in the case of organic farming since herbicides cannot be used. In this paper, we present the design of Cowbot, an autonomous weed mowing robot for pastures. Cowbot is an electric mower designed to operate in the rugged environments on cow pastures and provide a cost-effective method for weed control in organic farms. Path planning for the Cowbot is challenging since weed distribution on pastures is unknown. Given a limited field of view, online path planning is necessary to detect weeds and plan paths to mow them. We study the general online path planning problem for an autonomous mower with curvature and field of view constraints. We develop two online path planning algorithms that are able to utilize new information about weeds to optimize path length and ensure coverage. We deploy our algorithms on the Cowbot and perform field experiments to validate the suitability of our methods for real-time path planning. We also perform extensive simulation experiments which show that our algorithms result in up to 60 % reduction in path length as compared to baseline boustrophedon and random-search based coverage paths.
Visual Monitoring for Multiple Points of Interest on a 2.5D Terrain using a UAV with Limited Field-of-View Constraint
Mar 18, 2019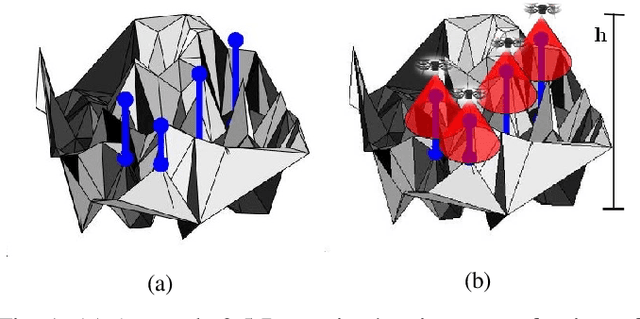
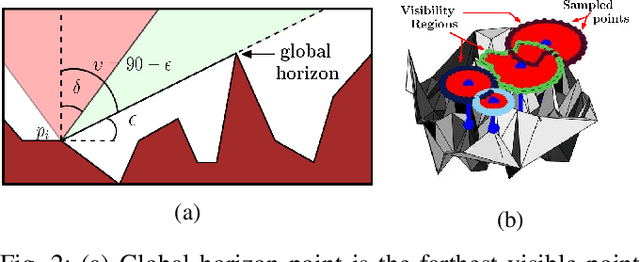
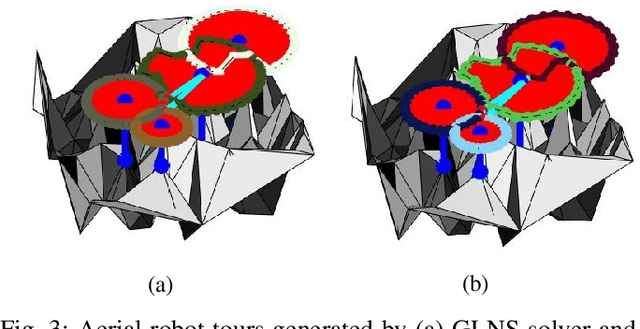
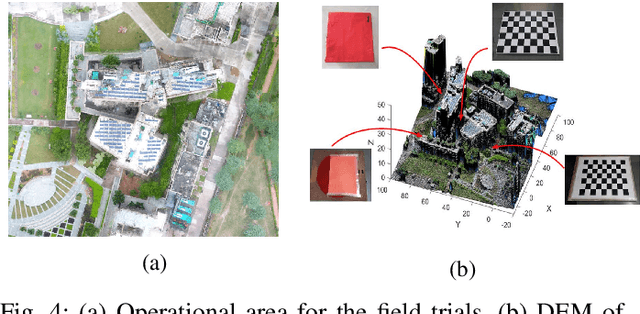
Varying terrain conditions and limited field-of-view restricts the visibility of aerial robots while performing visual monitoring operations. In this paper, we study the multi-point monitoring problem on a 2.5D terrain using an unmanned aerial vehicle (UAV) with limited camera field-of-view. This problem is NP-Hard and hence we develop a two phase strategy to compute an approximate tour for the UAV. In the first phase, visibility regions on the flight plane are determined for each point of interest. In the second phase, a tour for the UAV to visit each visibility region is computed by casting the problem as an instance of the Traveling Salesman Problem with Neighbourhoods (TSPN). We design a constant-factor approximation algorithm for the TSPN instance. Further, we reduce the TSPN instance to an instance of the Generalized Traveling Salesman Problem (GTSP) and devise an ILP formulation to solve it. We present a comparative evaluation of solutions computed using a branch-and-cut implementation and an off-the-shelf GTSP tool -- GLNS, while varying the points of interest density, sampling resolution and camera field-of-view. We also show results from preliminary field experiments.
Cooperative Planning for Fuel-constrained Aerial Vehicles and Ground-based Refueling Vehicles for Large-Scale Coverage
May 11, 2018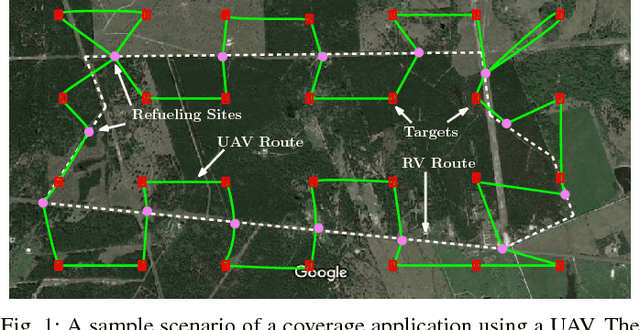
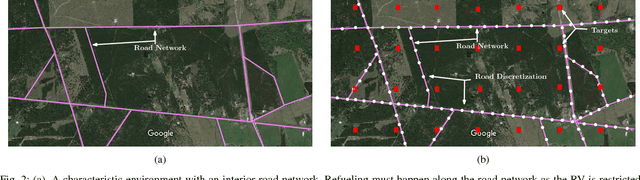
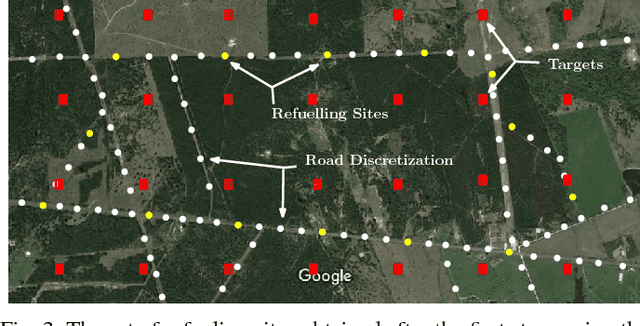
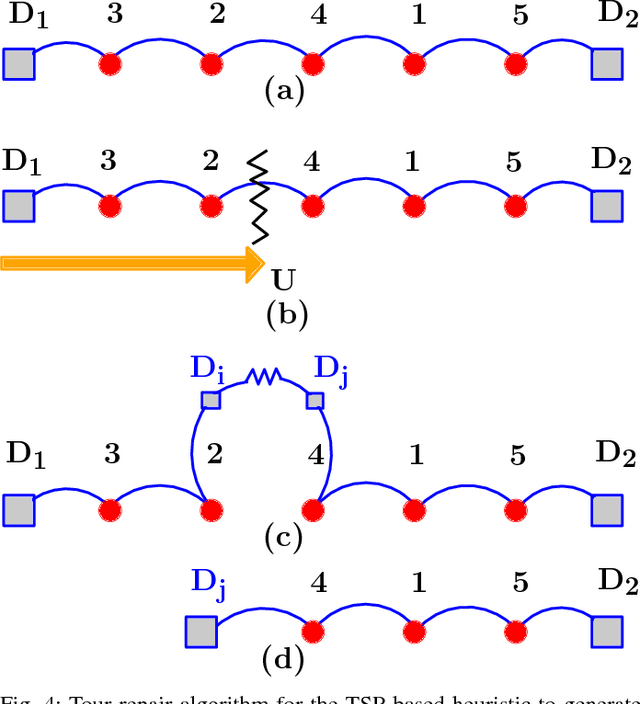
Low cost Unmanned Aerial Vehicles (UAVs) need multiple refuels to accomplish large area coverage. The number of refueling stations and their placement plays a vital role in determining coverage efficiency. In this paper, we propose the use of a ground-based refueling vehicle (RV) to increase the operational range of a UAV in both spatial and temporal domains. Determining optimal routes for the UAV and RV, and selecting optimized locations for refueling to aid in minimizing coverage time is a challenging problem due to different vehicle speeds, coupling between refueling location placement, and the coverage area at each location. We develop a two-stage strategy for coupled route planning for UAV and RV to perform a coverage mission. The first stage computes a minimal set of refueling sites that permit a feasible UAV route. In the second stage, multiple Mixed-Integer Linear Programming (MILP) formulations are developed to plan optimal routes for the UAV and the refueling vehicle taking into account the feasible set of refueling sites generated in stage one. The performance of different formulations is compared empirically. In addition, computationally efficient heuristics are developed to solve the routing problem. Extensive simulations are conducted to corroborate the effectiveness of proposed approaches.