 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeOnline Coverage Planning for an Autonomous Weed Mowing Robot with Curvature Constraints
Paper and Code
Nov 19, 2021
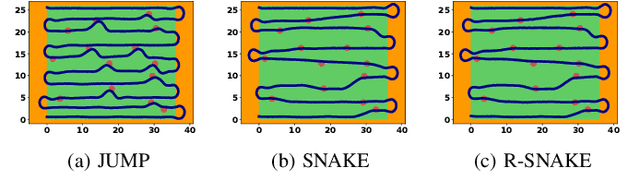
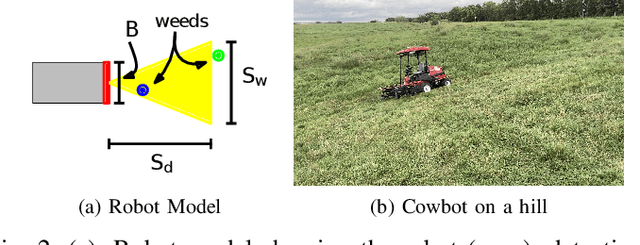
The land used for grazing cattle takes up about one-third of the land in the United States. These areas can be highly rugged. Yet, they need to be maintained to prevent weeds from taking over the nutritious grassland. This can be a daunting task especially in the case of organic farming since herbicides cannot be used. In this paper, we present the design of Cowbot, an autonomous weed mowing robot for pastures. Cowbot is an electric mower designed to operate in the rugged environments on cow pastures and provide a cost-effective method for weed control in organic farms. Path planning for the Cowbot is challenging since weed distribution on pastures is unknown. Given a limited field of view, online path planning is necessary to detect weeds and plan paths to mow them. We study the general online path planning problem for an autonomous mower with curvature and field of view constraints. We develop two online path planning algorithms that are able to utilize new information about weeds to optimize path length and ensure coverage. We deploy our algorithms on the Cowbot and perform field experiments to validate the suitability of our methods for real-time path planning. We also perform extensive simulation experiments which show that our algorithms result in up to 60 % reduction in path length as compared to baseline boustrophedon and random-search based coverage paths.