 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeVisual Monitoring for Multiple Points of Interest on a 2.5D Terrain using a UAV with Limited Field-of-View Constraint
Paper and Code
Mar 18, 2019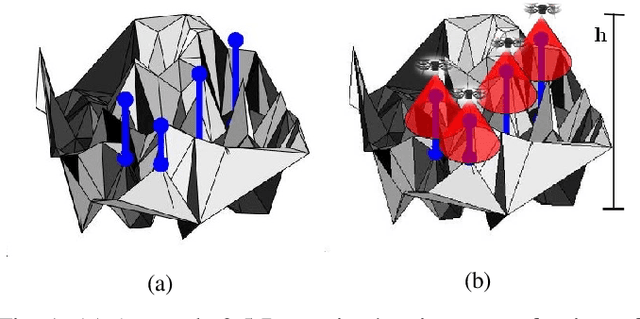
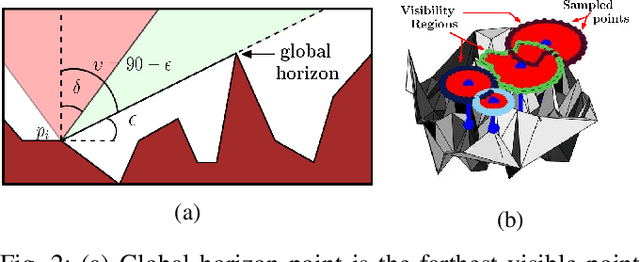
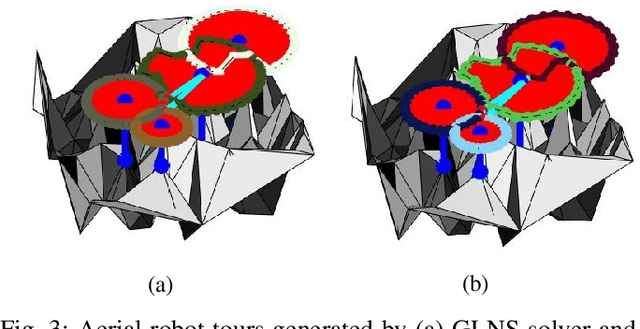
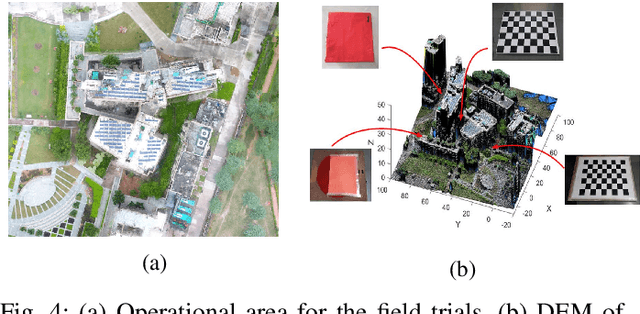
Varying terrain conditions and limited field-of-view restricts the visibility of aerial robots while performing visual monitoring operations. In this paper, we study the multi-point monitoring problem on a 2.5D terrain using an unmanned aerial vehicle (UAV) with limited camera field-of-view. This problem is NP-Hard and hence we develop a two phase strategy to compute an approximate tour for the UAV. In the first phase, visibility regions on the flight plane are determined for each point of interest. In the second phase, a tour for the UAV to visit each visibility region is computed by casting the problem as an instance of the Traveling Salesman Problem with Neighbourhoods (TSPN). We design a constant-factor approximation algorithm for the TSPN instance. Further, we reduce the TSPN instance to an instance of the Generalized Traveling Salesman Problem (GTSP) and devise an ILP formulation to solve it. We present a comparative evaluation of solutions computed using a branch-and-cut implementation and an off-the-shelf GTSP tool -- GLNS, while varying the points of interest density, sampling resolution and camera field-of-view. We also show results from preliminary field experiments.