 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeCooperative Planning for Fuel-constrained Aerial Vehicles and Ground-based Refueling Vehicles for Large-Scale Coverage
Paper and Code
May 11, 2018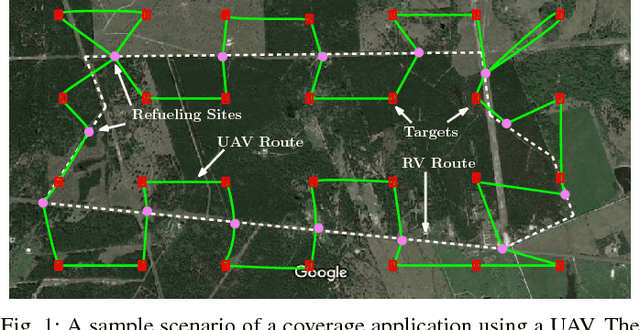
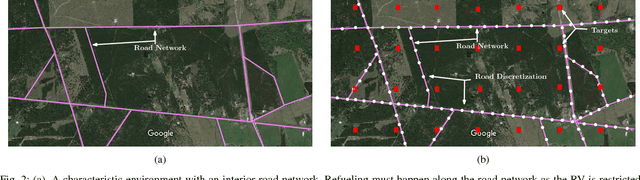
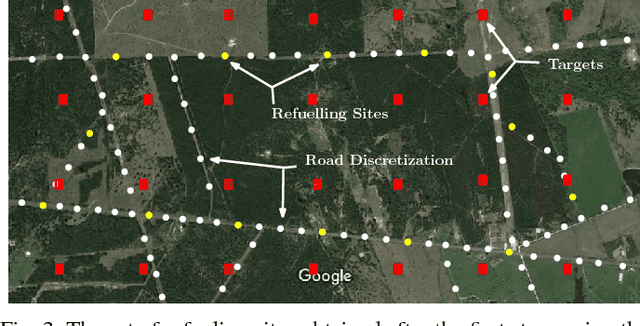
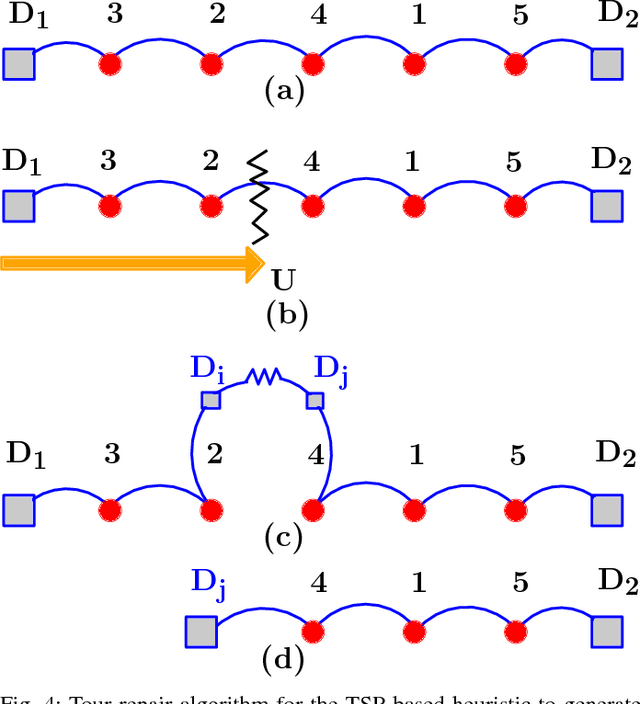
Low cost Unmanned Aerial Vehicles (UAVs) need multiple refuels to accomplish large area coverage. The number of refueling stations and their placement plays a vital role in determining coverage efficiency. In this paper, we propose the use of a ground-based refueling vehicle (RV) to increase the operational range of a UAV in both spatial and temporal domains. Determining optimal routes for the UAV and RV, and selecting optimized locations for refueling to aid in minimizing coverage time is a challenging problem due to different vehicle speeds, coupling between refueling location placement, and the coverage area at each location. We develop a two-stage strategy for coupled route planning for UAV and RV to perform a coverage mission. The first stage computes a minimal set of refueling sites that permit a feasible UAV route. In the second stage, multiple Mixed-Integer Linear Programming (MILP) formulations are developed to plan optimal routes for the UAV and the refueling vehicle taking into account the feasible set of refueling sites generated in stage one. The performance of different formulations is compared empirically. In addition, computationally efficient heuristics are developed to solve the routing problem. Extensive simulations are conducted to corroborate the effectiveness of proposed approaches.