 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeGlobal Symmetry and Orthogonal Transformations from Geometrical Moment $n$-tuples
Feb 08, 2026Detecting symmetry is crucial for effective object grasping for several reasons. Recognizing symmetrical features or axes within an object helps in developing efficient grasp strategies, as grasping along these axes typically results in a more stable and balanced grip, thereby facilitating successful manipulation. This paper employs geometrical moments to identify symmetries and estimate orthogonal transformations, including rotations and mirror transformations, for objects centered at the frame origin. It provides distinctive metrics for detecting symmetries and estimating orthogonal transformations, encompassing rotations, reflections, and their combinations. A comprehensive methodology is developed to obtain these functions in n-dimensional space, specifically moment \( n \)-tuples. Extensive validation tests are conducted on both 2D and 3D objects to ensure the robustness and reliability of the proposed approach. The proposed method is also compared to state-of-the-art work using iterative optimization for detecting multiple planes of symmetry. The results indicate that combining our method with the iterative one yields satisfactory outcomes in terms of the number of symmetry planes detected and computation time.
Toward Efficient Visual Gyroscopes: Spherical Moments, Harmonics Filtering, and Masking Techniques for Spherical Camera Applications
Apr 02, 2024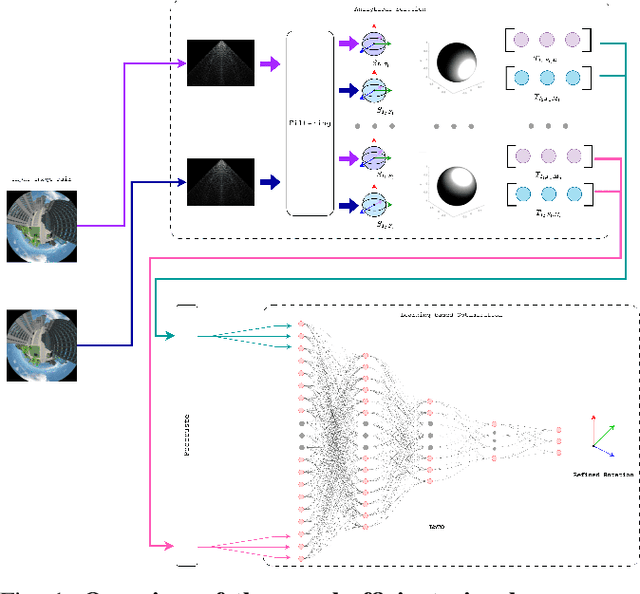



Unlike a traditional gyroscope, a visual gyroscope estimates camera rotation through images. The integration of omnidirectional cameras, offering a larger field of view compared to traditional RGB cameras, has proven to yield more accurate and robust results. However, challenges arise in situations that lack features, have substantial noise causing significant errors, and where certain features in the images lack sufficient strength, leading to less precise prediction results. Here, we address these challenges by introducing a novel visual gyroscope, which combines an analytical method with a neural network approach to provide a more efficient and accurate rotation estimation from spherical images. The presented method relies on three key contributions: an adapted analytical approach to compute the spherical moments coefficients, introduction of masks for better global feature representation, and the use of a multilayer perceptron to adaptively choose the best combination of masks and filters. Experimental results demonstrate superior performance of the proposed approach in terms of accuracy. The paper emphasizes the advantages of integrating machine learning to optimize analytical solutions, discusses limitations, and suggests directions for future research.
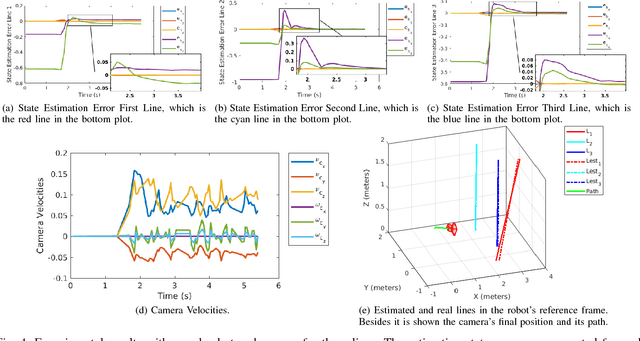
On Incremental Structure-from-Motion using Lines
May 24, 2021


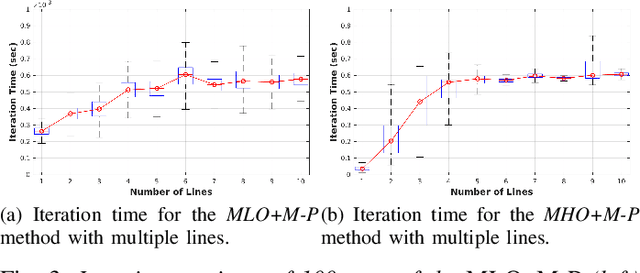
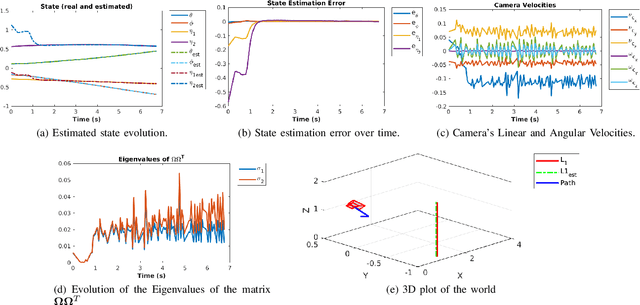
Humans tend to build environments with structure, which consists of mainly planar surfaces. From the intersection of planar surfaces arise straight lines. Lines have more degrees-of-freedom than points. Thus, line-based Structure-from-Motion (SfM) provides more information about the environment. In this paper, we present solutions for SfM using lines, namely, incremental SfM. These approaches consist of designing state observers for a camera's dynamical visual system looking at a 3D line. We start by presenting a model that uses spherical coordinates for representing the line's moment vector. We show that this parameterization has singularities, and therefore we introduce a more suitable model that considers the line's moment and shortest viewing ray. Concerning the observers, we present two different methodologies. The first uses a memory-less state-of-the-art framework for dynamic visual systems. Since the previous states of the robotic agent are accessible -- while performing the 3D mapping of the environment -- the second approach aims at exploiting the use of memory to improve the estimation accuracy and convergence speed. The two models and the two observers are evaluated in simulation and real data, where mobile and manipulator robots are used.
Active Estimation of 3D Lines in Spherical Coordinates
Mar 21, 2019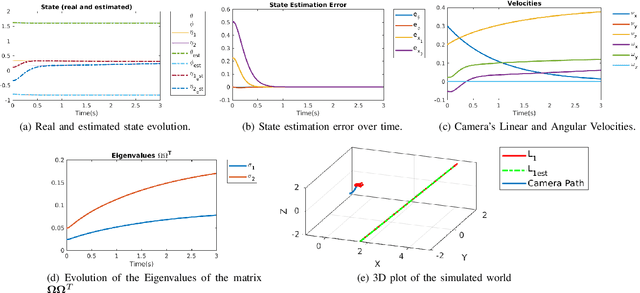
Straight lines are common features in human made environments, which makes them a frequently explored feature for control applications. Many control schemes, like Visual Servoing, require the 3D parameters of the features to be estimated. In order to obtain the 3D structure of lines, a nonlinear observer is proposed. However, to guarantee convergence, the dynamical system must be coupled with an algebraic equation. This is achieved by using spherical coordinates to represent the line's moment vector, and a change of basis, which allows to introduce the algebraic constraint directly on the system's dynamics. Finally, a control law that attempts to optimize the convergence behavior of the observer is presented. The approach is validated in simulation, and with a real robotic platform with a camera onboard.
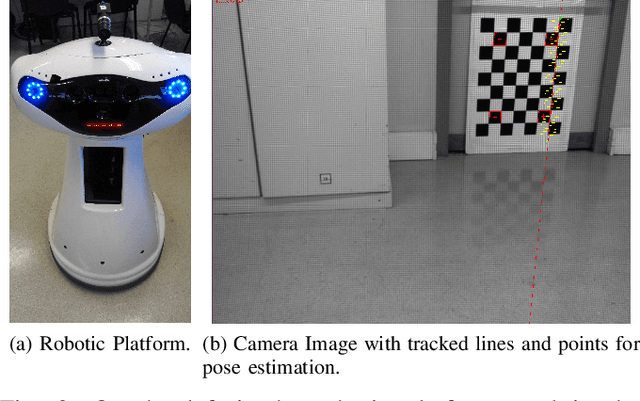
Active Structure-from-Motion for 3D Straight Lines
Dec 12, 2018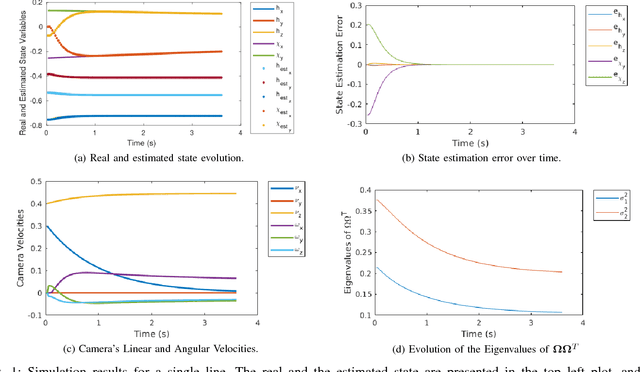
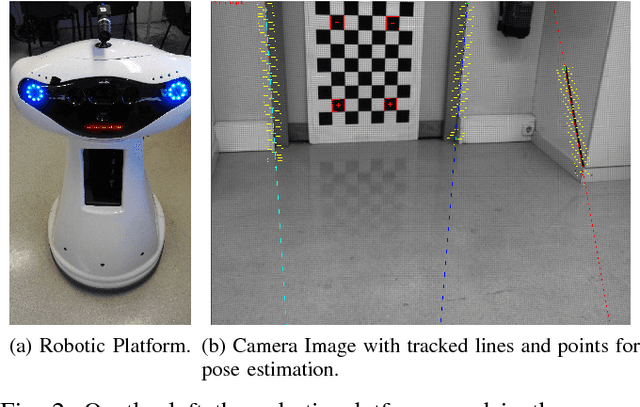
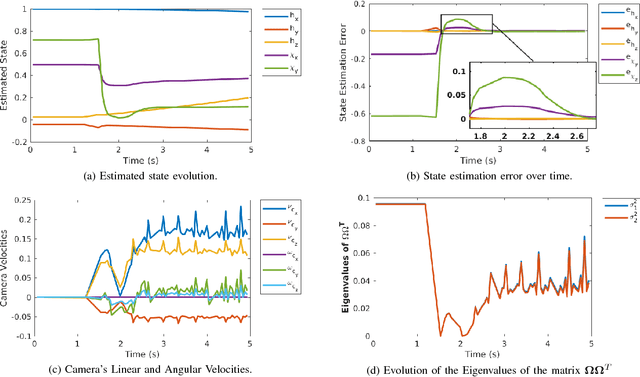
A reliable estimation of 3D parameters is a must for several applications like planning and control. Included in the latter is the Image-Based Visual Servoing, whose control scheme depends directly on 3D parameters e.g. depth of points, and depth and direction of 3D straight lines. Recently a framework for Active Structure-from-Motion was proposed, addressing the former feature type. However, straight lines were not addressed. These are 1D objects, which allow for more robust detection and tracking. In this work, the problem of Active Structure-from-Motion for 3D straight lines is addressed. An explicit representation of this type of feature is presented, and a change of variables is proposed, which allows the dynamics of the line to respect the conditions for observability of the framework. The approach is validated first in simulation for a single line, and second using a real robot. The latter set of experiments are conducted first for a single line, and then for three lines, which is the minimum required number of lines to control a 6 degree of freedom camera.
A Framework for Moment Invariants
Jul 17, 2018For more than half a century, moments have attracted lot ot interest in the pattern recognition community.The moments of a distribution (an object) provide several of its characteristics as center of gravity, orientation, disparity, volume. Moments can be used to define invariant characteristics to some transformations that an object can undergo, commonly called moment invariants. This work provides a simple and systematic formalism to compute geometric moment invariants in n-dimensional space.