 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeProceedings of the NeurIPS 2021 Workshop on Machine Learning for the Developing World: Global Challenges
Jan 10, 2023These are the proceedings of the 5th workshop on Machine Learning for the Developing World (ML4D), held as part of the Thirty-fifth Conference on Neural Information Processing Systems (NeurIPS) on December 14th, 2021.
Learning Nigerian accent embeddings from speech: preliminary results based on SautiDB-Naija corpus
Dec 12, 2021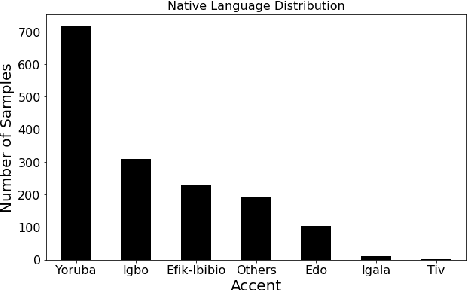
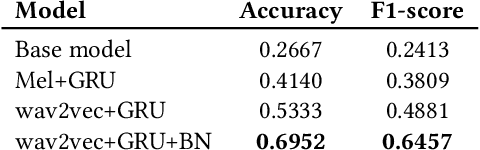
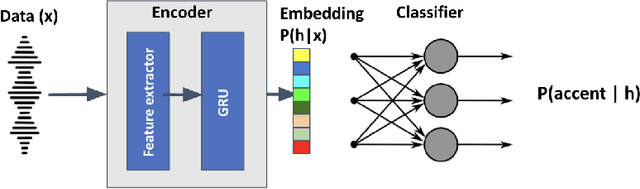
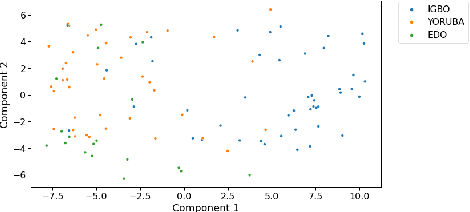
This paper describes foundational efforts with SautiDB-Naija, a novel corpus of non-native (L2) Nigerian English speech. We describe how the corpus was created and curated as well as preliminary experiments with accent classification and learning Nigerian accent embeddings. The initial version of the corpus includes over 900 recordings from L2 English speakers of Nigerian languages, such as Yoruba, Igbo, Edo, Efik-Ibibio, and Igala. We further demonstrate how fine-tuning on a pre-trained model like wav2vec can yield representations suitable for related speech tasks such as accent classification. SautiDB-Naija has been published to Zenodo for general use under a flexible Creative Commons License.
Proceedings of the NeurIPS 2020 Workshop on Machine Learning for the Developing World: Improving Resilience
Jan 12, 2021These are the proceedings of the 4th workshop on Machine Learning for the Developing World (ML4D), held as part of the Thirty-fourth Conference on Neural Information Processing Systems (NeurIPS) on Saturday, December 12th 2020.
Differentiable Histogram with Hard-Binning
Nov 20, 2020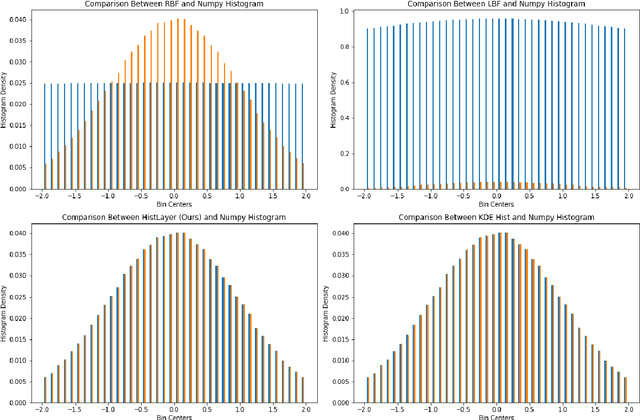

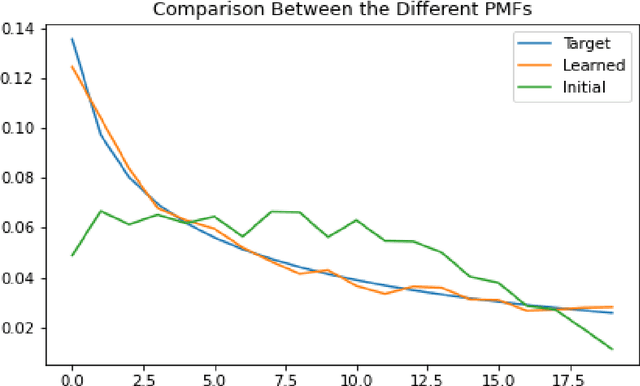
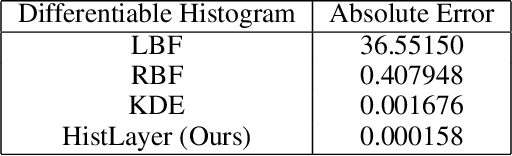
The simplicity and expressiveness of a histogram render it a useful feature in different contexts including deep learning. Although the process of computing a histogram is non-differentiable, researchers have proposed differentiable approximations, which have some limitations. A differentiable histogram that directly approximates the hard-binning operation in conventional histograms is proposed. It combines the strength of existing differentiable histograms and overcomes their individual challenges. In comparison to a histogram computed using Numpy, the proposed histogram has an absolute approximation error of 0.000158.
Agent Probing Interaction Policies
Dec 13, 2019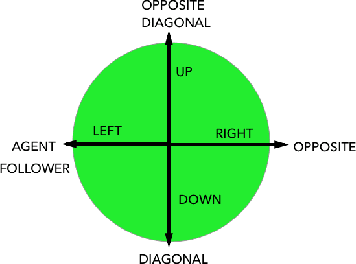
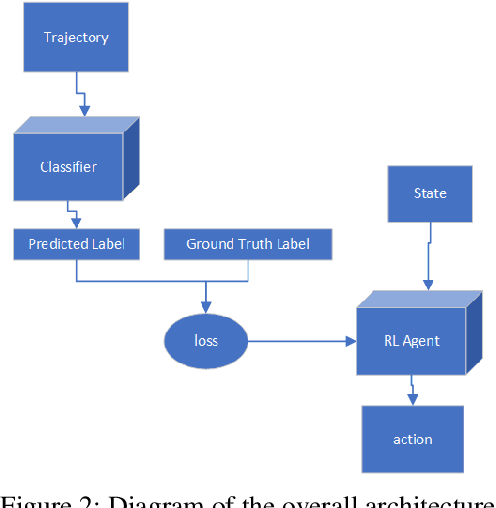
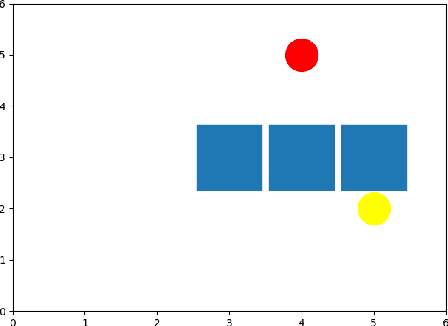
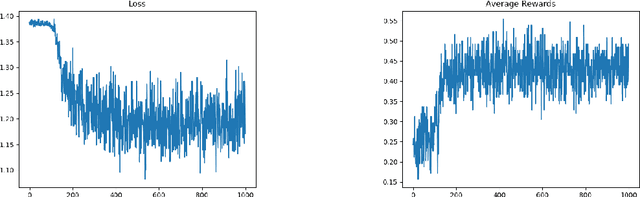
Reinforcement learning in a multi agent system is difficult because these systems are inherently non-stationary in nature. In such a case, identifying the type of the opposite agent is crucial and can help us address this non-stationary environment. We have investigated if we can employ some probing policies which help us better identify the type of the other agent in the environment. We've made a simplifying assumption that the other agent has a stationary policy that our probing policy is trying to approximate. Our work extends Environmental Probing Interaction Policy framework to handle multi agent environments.
Unsupervised Domain Adaptation by Optical Flow Augmentation in Semantic Segmentation
Nov 20, 2019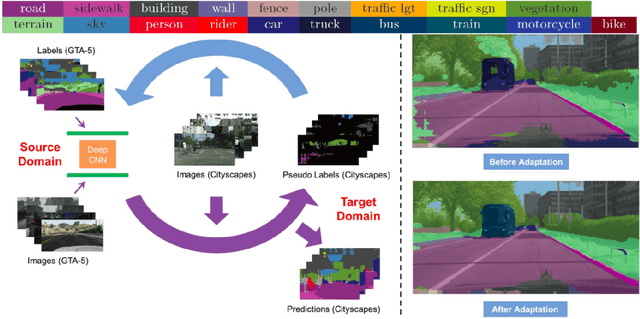
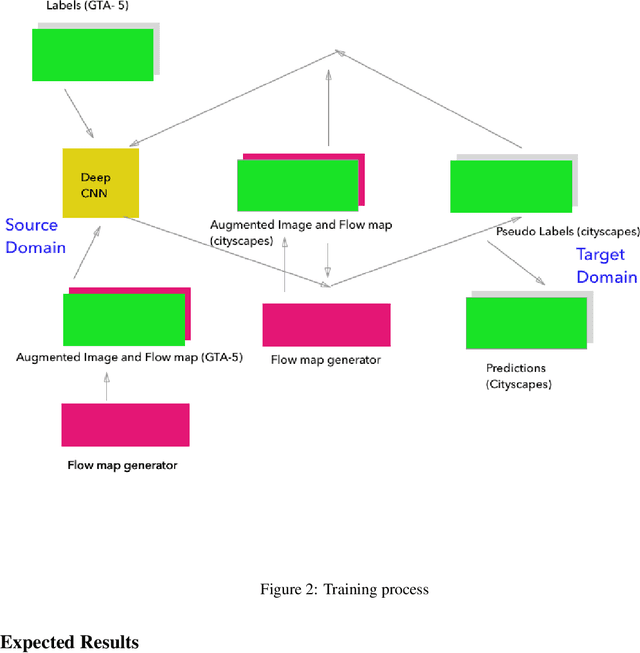
It is expensive to generate real-life image labels and there is a domain gap between real-life and simulated images, hence a model trained on the latter cannot adapt to the former. Solving this can totally eliminate the need for labeling real-life datasets completely. Class balanced self-training is one of the existing techniques that attempt to reduce the domain gap. Moreover, augmenting RGB with flow maps has improved performance in simple semantic segmentation and geometry is preserved across domains. Hence, by augmenting images with dense optical flow map, domain adaptation in semantic segmentation can be improved.