 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeNeuroSwarm: Multi-Agent Neural 3D Scene Reconstruction and Segmentation with UAV for Optimal Navigation of Quadruped Robot
Aug 03, 2023



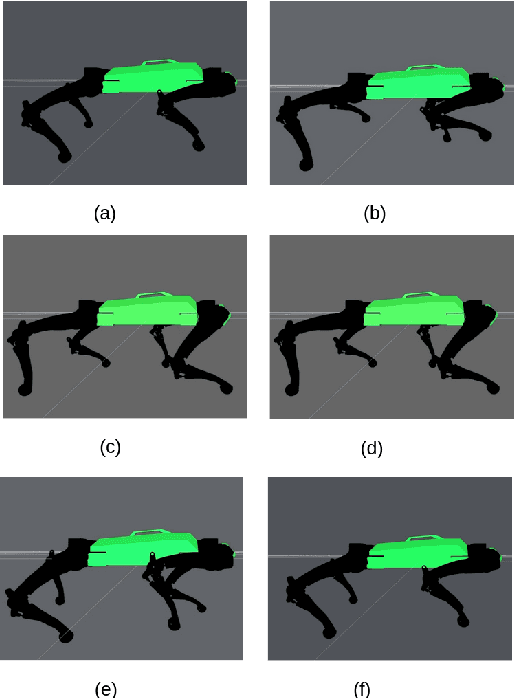
Quadruped robots have the distinct ability to adapt their body and step height to navigate through cluttered environments. Nonetheless, for these robots to utilize their full potential in real-world scenarios, they require awareness of their environment and obstacle geometry. We propose a novel multi-agent robotic system that incorporates cutting-edge technologies. The proposed solution features a 3D neural reconstruction algorithm that enables navigation of a quadruped robot in both static and semi-static environments. The prior areas of the environment are also segmented according to the quadruped robots' abilities to pass them. Moreover, we have developed an adaptive neural field optimal motion planner (ANFOMP) that considers both collision probability and obstacle height in 2D space.Our new navigation and mapping approach enables quadruped robots to adjust their height and behavior to navigate under arches and push through obstacles with smaller dimensions. The multi-agent mapping operation has proven to be highly accurate, with an obstacle reconstruction precision of 82%. Moreover, the quadruped robot can navigate with 3D obstacle information and the ANFOMP system, resulting in a 33.3% reduction in path length and a 70% reduction in navigation time.
HyperDog: An Open-Source Quadruped Robot Platform Based on ROS2 and micro-ROS
Sep 19, 2022

Nowadays, design and development of legged quadruped robots is a quite active area of scientific research. In fact, the legged robots have become popular due to their capabilities to adapt to harsh terrains and diverse environmental conditions in comparison to other mobile robots. With the higher demand for legged robot experiments, more researches and engineers need an affordable and quick way of locomotion algorithm development. In this paper, we present a new open source quadruped robot HyperDog platform, which features 12 RC servo motors, onboard NVIDIA Jetson nano computer and STM32F4 Discovery board. HyperDog is an open-source platform for quadruped robotic software development, which is based on Robot Operating System 2 (ROS2) and micro-ROS. Moreover, the HyperDog is a quadrupedal robotic dog entirely built from 3D printed parts and carbon fiber, which allows the robot to have light weight and good strength. The idea of this work is to demonstrate an affordable and customizable way of robot development and provide researches and engineers with the legged robot platform, where different algorithms can be tested and validated in simulation and real environment. The developed project with code is available on GitHub (https://github.com/NDHANA94/hyperdog_ros2).
DogTouch: CNN-based Recognition of Surface Textures by Quadruped Robot with High Density Tactile Sensors
Jun 09, 2022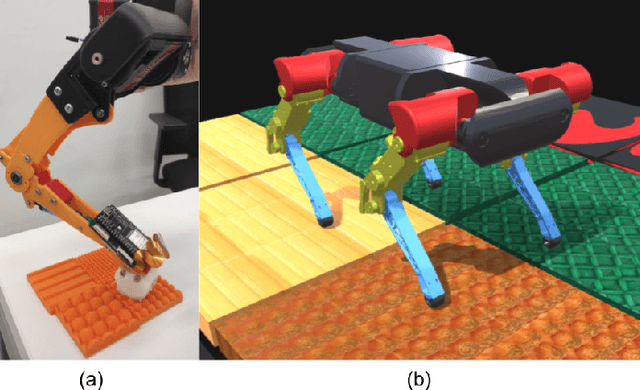
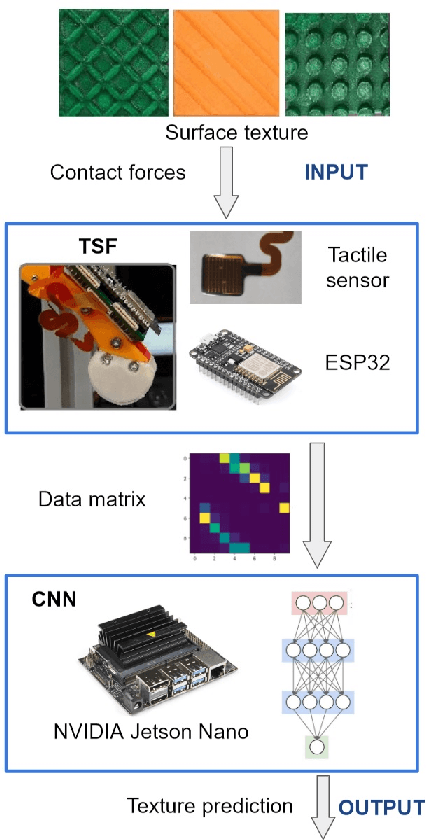
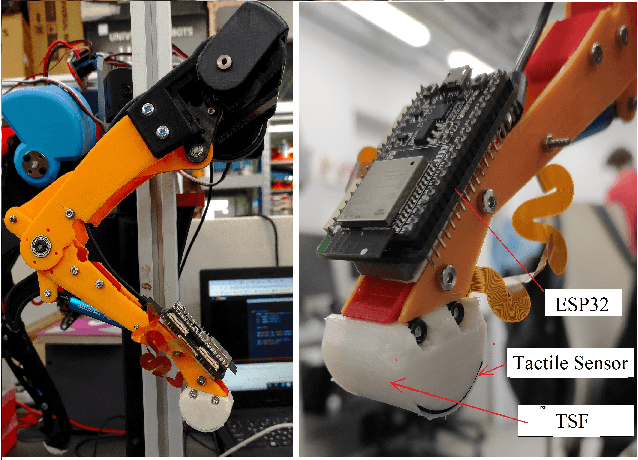
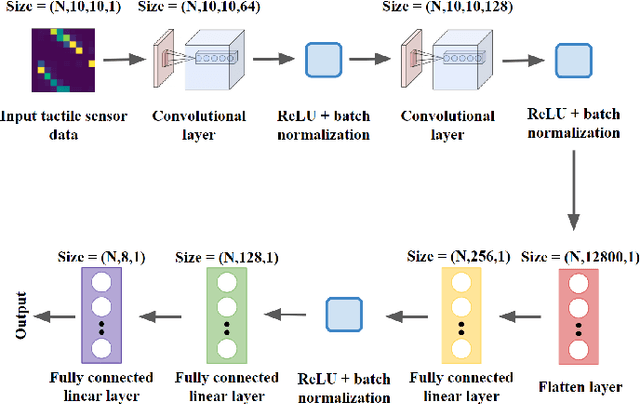
The ability to perform locomotion in various terrains is critical for legged robots. However, the robot has to have a better understanding of the surface it is walking on to perform robust locomotion on different terrains. Animals and humans are able to recognize the surface with the help of the tactile sensation on their feet. Although, the foot tactile sensation for legged robots has not been much explored. This paper presents research on a novel quadruped robot DogTouch with tactile sensing feet (TSF). TSF allows the recognition of different surface textures utilizing a tactile sensor and a convolutional neural network (CNN). The experimental results show a sufficient validation accuracy of 74.37\% for our trained CNN-based model, with the highest recognition for line patterns of 90\%. In the future, we plan to improve the prediction model by presenting surface samples with the various depths of patterns and applying advanced Deep Learning and Shallow learning models for surface recognition. Additionally, we propose a novel approach to navigation of quadruped and legged robots. We can arrange the tactile paving textured surface (similar that used for blind or visually impaired people). Thus, DogTouch will be capable of locomotion in unknown environment by just recognizing the specific tactile patterns which will indicate the straight path, left or right turn, pedestrian crossing, road, and etc. That will allow robust navigation regardless of lighting condition. Future quadruped robots equipped with visual and tactile perception system will be able to safely and intelligently navigate and interact in the unstructured indoor and outdoor environment.