 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeDiffusionAnything: End-to-End In-context Diffusion Learning for Unified Navigation and Pre-Grasp Motion
Mar 27, 2026Efficiently predicting motion plans directly from vision remains a fundamental challenge in robotics, where planning typically requires explicit goal specification and task-specific design. Recent vision-language-action (VLA) models infer actions directly from visual input but demand massive computational resources, extensive training data, and fail zero-shot in novel scenes. We present a unified image-space diffusion policy handling both meter-scale navigation and centimeter-scale manipulation via multi-scale feature modulation, with only 5 minutes of self-supervised data per task. Three key innovations drive the framework: (1) Multi-scale FiLM conditioning on task mode, depth scale, and spatial attention enables task-appropriate behavior in a single model; (2) trajectory-aligned depth prediction focuses metric 3D reasoning along generated waypoints; (3) self-supervised attention from AnyTraverse enables goal-directed inference without vision-language models and depth sensors. Operating purely from RGB input (2.0 GB memory, 10 Hz), the model achieves robust zero-shot generalization to novel scenes while remaining suitable for onboard deployment.
HumanDiffusion: A Vision-Based Diffusion Trajectory Planner with Human-Conditioned Goals for Search and Rescue UAV
Jan 21, 2026Reliable human--robot collaboration in emergency scenarios requires autonomous systems that can detect humans, infer navigation goals, and operate safely in dynamic environments. This paper presents HumanDiffusion, a lightweight image-conditioned diffusion planner that generates human-aware navigation trajectories directly from RGB imagery. The system combines YOLO-11--based human detection with diffusion-driven trajectory generation, enabling a quadrotor to approach a target person and deliver medical assistance without relying on prior maps or computationally intensive planning pipelines. Trajectories are predicted in pixel space, ensuring smooth motion and a consistent safety margin around humans. We evaluate HumanDiffusion in simulation and real-world indoor mock-disaster scenarios. On a 300-sample test set, the model achieves a mean squared error of 0.02 in pixel-space trajectory reconstruction. Real-world experiments demonstrate an overall mission success rate of 80% across accident-response and search-and-locate tasks with partial occlusions. These results indicate that human-conditioned diffusion planning offers a practical and robust solution for human-aware UAV navigation in time-critical assistance settings.
SharpSLAM: 3D Object-Oriented Visual SLAM with Deblurring for Agile Drones
Oct 07, 2024



The paper focuses on the algorithm for improving the quality of 3D reconstruction and segmentation in DSP-SLAM by enhancing the RGB image quality. SharpSLAM algorithm developed by us aims to decrease the influence of high dynamic motion on visual object-oriented SLAM through image deblurring, improving all aspects of object-oriented SLAM, including localization, mapping, and object reconstruction. The experimental results revealed noticeable improvement in object detection quality, with F-score increased from 82.9% to 86.2% due to the higher number of features and corresponding map points. The RMSE of signed distance function has also decreased from 17.2 to 15.4 cm. Furthermore, our solution has enhanced object positioning, with an increase in the IoU from 74.5% to 75.7%. SharpSLAM algorithm has the potential to highly improve the quality of 3D reconstruction and segmentation in DSP-SLAM and to impact a wide range of fields, including robotics, autonomous vehicles, and augmented reality.
LocoNeRF: A NeRF-based Approach for Local Structure from Motion for Precise Localization
Oct 08, 2023Visual localization is a critical task in mobile robotics, and researchers are continuously developing new approaches to enhance its efficiency. In this article, we propose a novel approach to improve the accuracy of visual localization using Structure from Motion (SfM) techniques. We highlight the limitations of global SfM, which suffers from high latency, and the challenges of local SfM, which requires large image databases for accurate reconstruction. To address these issues, we propose utilizing Neural Radiance Fields (NeRF), as opposed to image databases, to cut down on the space required for storage. We suggest that sampling reference images around the prior query position can lead to further improvements. We evaluate the accuracy of our proposed method against ground truth obtained using LIDAR and Advanced Lidar Odometry and Mapping in Real-time (A-LOAM), and compare its storage usage against local SfM with COLMAP in the conducted experiments. Our proposed method achieves an accuracy of 0.068 meters compared to the ground truth, which is slightly lower than the most advanced method COLMAP, which has an accuracy of 0.022 meters. However, the size of the database required for COLMAP is 400 megabytes, whereas the size of our NeRF model is only 160 megabytes. Finally, we perform an ablation study to assess the impact of using reference images from the NeRF reconstruction.
NeuroSwarm: Multi-Agent Neural 3D Scene Reconstruction and Segmentation with UAV for Optimal Navigation of Quadruped Robot
Aug 03, 2023



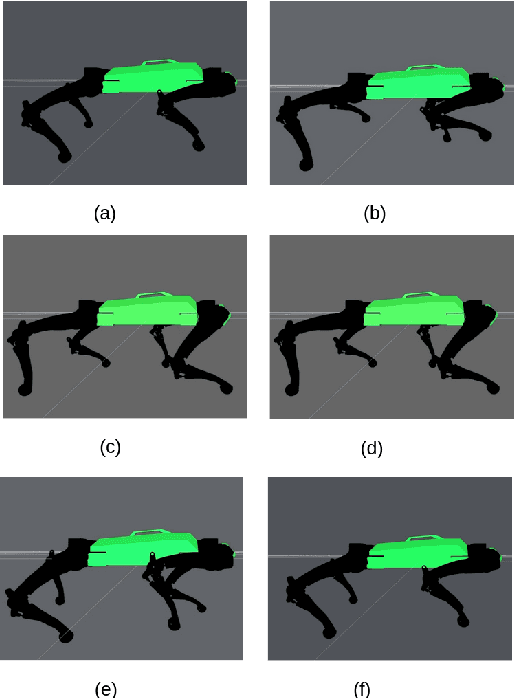
Quadruped robots have the distinct ability to adapt their body and step height to navigate through cluttered environments. Nonetheless, for these robots to utilize their full potential in real-world scenarios, they require awareness of their environment and obstacle geometry. We propose a novel multi-agent robotic system that incorporates cutting-edge technologies. The proposed solution features a 3D neural reconstruction algorithm that enables navigation of a quadruped robot in both static and semi-static environments. The prior areas of the environment are also segmented according to the quadruped robots' abilities to pass them. Moreover, we have developed an adaptive neural field optimal motion planner (ANFOMP) that considers both collision probability and obstacle height in 2D space.Our new navigation and mapping approach enables quadruped robots to adjust their height and behavior to navigate under arches and push through obstacles with smaller dimensions. The multi-agent mapping operation has proven to be highly accurate, with an obstacle reconstruction precision of 82%. Moreover, the quadruped robot can navigate with 3D obstacle information and the ANFOMP system, resulting in a 33.3% reduction in path length and a 70% reduction in navigation time.
HyperDog: An Open-Source Quadruped Robot Platform Based on ROS2 and micro-ROS
Sep 19, 2022

Nowadays, design and development of legged quadruped robots is a quite active area of scientific research. In fact, the legged robots have become popular due to their capabilities to adapt to harsh terrains and diverse environmental conditions in comparison to other mobile robots. With the higher demand for legged robot experiments, more researches and engineers need an affordable and quick way of locomotion algorithm development. In this paper, we present a new open source quadruped robot HyperDog platform, which features 12 RC servo motors, onboard NVIDIA Jetson nano computer and STM32F4 Discovery board. HyperDog is an open-source platform for quadruped robotic software development, which is based on Robot Operating System 2 (ROS2) and micro-ROS. Moreover, the HyperDog is a quadrupedal robotic dog entirely built from 3D printed parts and carbon fiber, which allows the robot to have light weight and good strength. The idea of this work is to demonstrate an affordable and customizable way of robot development and provide researches and engineers with the legged robot platform, where different algorithms can be tested and validated in simulation and real environment. The developed project with code is available on GitHub (https://github.com/NDHANA94/hyperdog_ros2).