 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeDogTouch: CNN-based Recognition of Surface Textures by Quadruped Robot with High Density Tactile Sensors
Paper and Code
Jun 09, 2022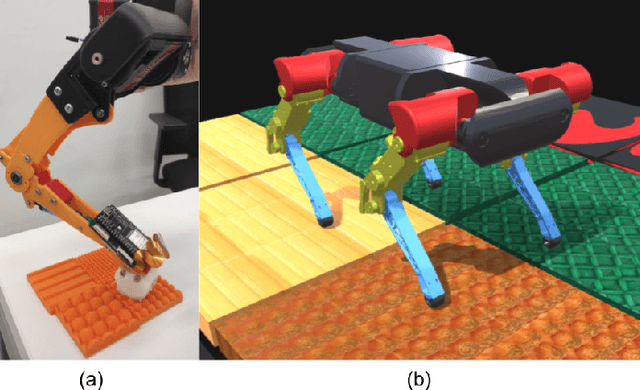
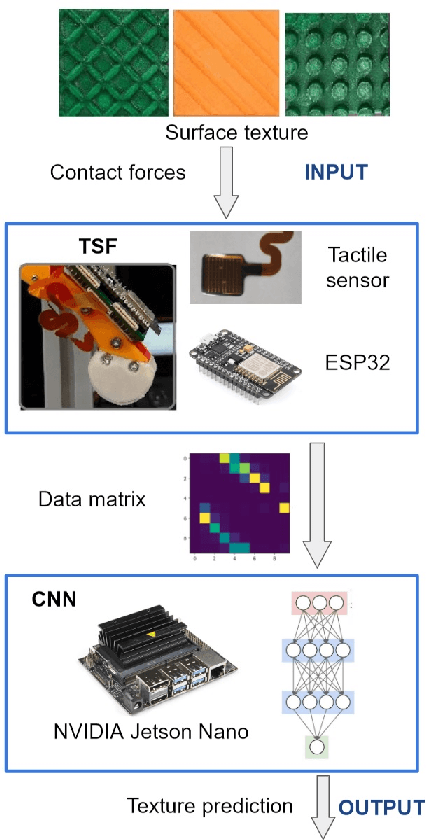
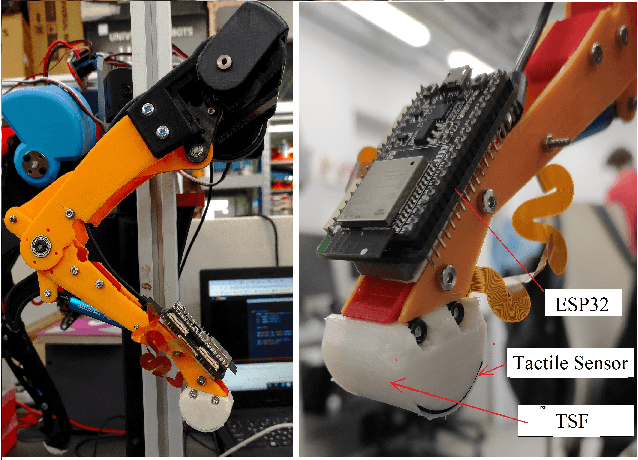
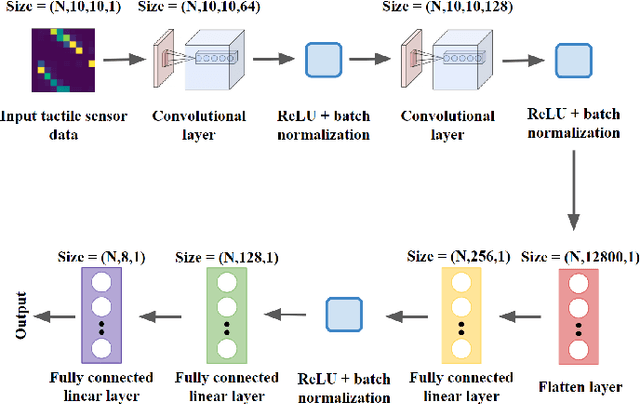
The ability to perform locomotion in various terrains is critical for legged robots. However, the robot has to have a better understanding of the surface it is walking on to perform robust locomotion on different terrains. Animals and humans are able to recognize the surface with the help of the tactile sensation on their feet. Although, the foot tactile sensation for legged robots has not been much explored. This paper presents research on a novel quadruped robot DogTouch with tactile sensing feet (TSF). TSF allows the recognition of different surface textures utilizing a tactile sensor and a convolutional neural network (CNN). The experimental results show a sufficient validation accuracy of 74.37\% for our trained CNN-based model, with the highest recognition for line patterns of 90\%. In the future, we plan to improve the prediction model by presenting surface samples with the various depths of patterns and applying advanced Deep Learning and Shallow learning models for surface recognition. Additionally, we propose a novel approach to navigation of quadruped and legged robots. We can arrange the tactile paving textured surface (similar that used for blind or visually impaired people). Thus, DogTouch will be capable of locomotion in unknown environment by just recognizing the specific tactile patterns which will indicate the straight path, left or right turn, pedestrian crossing, road, and etc. That will allow robust navigation regardless of lighting condition. Future quadruped robots equipped with visual and tactile perception system will be able to safely and intelligently navigate and interact in the unstructured indoor and outdoor environment.