 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeProceedings of 1st Workshop on Advancing Artificial Intelligence through Theory of Mind
Apr 28, 2025
This volume includes a selection of papers presented at the Workshop on Advancing Artificial Intelligence through Theory of Mind held at AAAI 2025 in Philadelphia US on 3rd March 2025. The purpose of this volume is to provide an open access and curated anthology for the ToM and AI research community.
Bi-Directional Mental Model Reconciliation for Human-Robot Interaction with Large Language Models
Mar 10, 2025In human-robot interactions, human and robot agents maintain internal mental models of their environment, their shared task, and each other. The accuracy of these representations depends on each agent's ability to perform theory of mind, i.e. to understand the knowledge, preferences, and intentions of their teammate. When mental models diverge to the extent that it affects task execution, reconciliation becomes necessary to prevent the degradation of interaction. We propose a framework for bi-directional mental model reconciliation, leveraging large language models to facilitate alignment through semi-structured natural language dialogue. Our framework relaxes the assumption of prior model reconciliation work that either the human or robot agent begins with a correct model for the other agent to align to. Through our framework, both humans and robots are able to identify and communicate missing task-relevant context during interaction, iteratively progressing toward a shared mental model.
Athletic Mobile Manipulator System for Robotic Wheelchair Tennis
Oct 05, 2022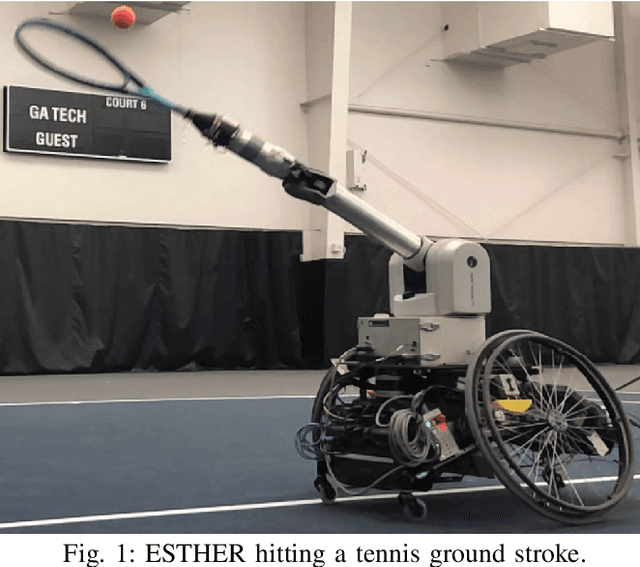
Athletics are a quintessential and universal expression of humanity. From French monks who in the 12th century invented jeu de paume, the precursor to modern lawn tennis, back to the K'iche' people who played the Maya Ballgame as a form of religious expression over three thousand years ago, humans have sought to train their minds and bodies to excel in sporting contests. Advances in robotics are opening up the possibility of robots in sports. Yet, key challenges remain, as most prior works in robotics for sports are limited to pristine sensing environments, do not require significant force generation, or are on miniaturized scales unsuited for joint human-robot play. In this paper, we propose the first open-source, autonomous robot for playing regulation wheelchair tennis. We demonstrate the performance of our full-stack system in executing ground strokes and evaluate each of the system's hardware and software components. The goal of this paper is to (1) inspire more research in human-scale robot athletics and (2) establish the first baseline towards developing a robot in future work that can serve as a teammate for mixed, human-robot doubles play. Our paper contributes to the science of systems design and poses a set of key challenges for the robotics community to address in striving towards a vision of human-robot collaboration in sports.
Do People Trust Robots that Learn in the Home?
Apr 08, 2022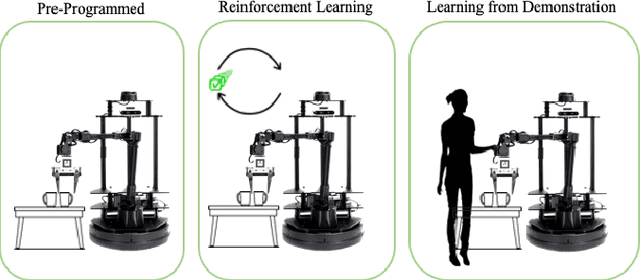



It is not scalable for assistive robotics to have all functionalities pre-programmed prior to user introduction. Instead, it is more realistic for agents to perform supplemental on site learning. This opportunity to learn user and environment particularities is especially helpful for care robots that assist with individualized caregiver activities in residential or nursing home environments. Many assistive robots, ranging in complexity from Roomba to Pepper, already conduct some of their learning in the home, observable to the user. We lack an understanding of how witnessing this learning impacts the user. Thus, we propose to assess end-user attitudes towards the concept of embodied robots that conduct some learning in the home as compared to robots that are delivered fully-capable. In this virtual, between-subjects study, we recruit end users (care-givers and care-takers) from nursing homes, and investigate user trust in three different domains: navigation, manipulation, and preparation. Informed by the first study where we identify agent learning as a key factor in determining trust, we propose a second study to explore how to modulate that trust. This second, in-person study investigates the effectiveness of apologies, explanations of robot failure, and transparency of learning at improving trust in embodied learning robots.