 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeStatistical and Deterministic RCS Characterization for ISAC Channel Modeling
Feb 17, 2025In this study, we perform a statistical analysis of the radar cross section (RCS) for various test targets in an indoor factory at \(25\)-\(28\) GHz, with the goal of formulating parameters that may be used for target identification and other sensing applications for future wireless systems. The analysis is conducted based on measurements in monostatic and bistatic configurations for bistatic angles of \(20^\circ\), \(40^\circ\), and \(60^\circ\), which are functions of transmitter-receiver (T-R) and target positions, via accurate \(3\)dB beamwidth of \(10^\circ\) in both azimuth and elevation planes. The test targets include unmanned aerial vehicles, an autonomous mobile robot, and a robotic arm. We utilize parametric statistical distributions to fit the measured RCS data. The analysis reveals that the \textit{lognormal and gamma distributions} are effective in modeling the RCS of the test targets over different reflecting points of the target itself, i.e. when target is in motion. Additionally, we provide a framework for evaluating the deterministic bistatic RCS of a rectangular sheet of laminated wood, due to its widespread use in indoor hotspot environments. Novel deterministic and statistical RCS models are evaluated, incorporating dependencies on the bistatic angle, T-R distance (\(2\)m -\(10\)m) and the target. The results demonstrate that some proposed RCS models accurately fit the measured data, highlighting their applicability in bistatic configurations.
Autonomous Reality Modelling for Cultural Heritage Sites employing cooperative quadrupedal robots and unmanned aerial vehicles
Feb 20, 2024Nowadays, the use of advanced sensors, such as terrestrial 3D laser scanners, mobile LiDARs and Unmanned Aerial Vehicles (UAV) photogrammetric imaging, has become the prevalent practice for 3D Reality Modeling and digitization of large-scale monuments of Cultural Heritage (CH). In practice, this process is heavily related to the expertise of the surveying team, handling the laborious planning and time-consuming execution of the 3D mapping process that is tailored to the specific requirements and constraints of each site. To minimize human intervention, this paper introduces a novel methodology for autonomous 3D Reality Modeling for CH monuments by employing au-tonomous biomimetic quadrupedal robotic agents and UAVs equipped with the appropriate sensors. These autonomous robotic agents carry out the 3D RM process in a systematic and repeatable ap-proach. The outcomes of this automated process may find applications in digital twin platforms, facilitating secure monitoring and management of cultural heritage sites and spaces, in both indoor and outdoor environments.
Multi-agent robotic systems and exploration algorithms: Applications for data collection in construction sites
Nov 02, 2023The construction industry has been notoriously slow to adopt new technology and embrace automation. This has resulted in lower efficiency and productivity compared to other industries where automation has been widely adopted. However, recent advancements in robotics and artificial intelligence offer a potential solution to this problem. In this study, a methodology is proposed to integrate multi-robotic systems in construction projects with the aim of increasing efficiency and productivity. The proposed approach involves the use of multiple robot and human agents working collaboratively to complete a construction task. The methodology was tested through a case study that involved 3D digitization of a small, occluded space using two robots and one human agent. The results show that integrating multi-agent robotic systems in construction can effectively overcome challenges and complete tasks efficiently. The implications of this study suggest that multi-agent robotic systems could revolutionize the industry.
Relative Visual Localization for Unmanned Aerial Systems
Mar 04, 2020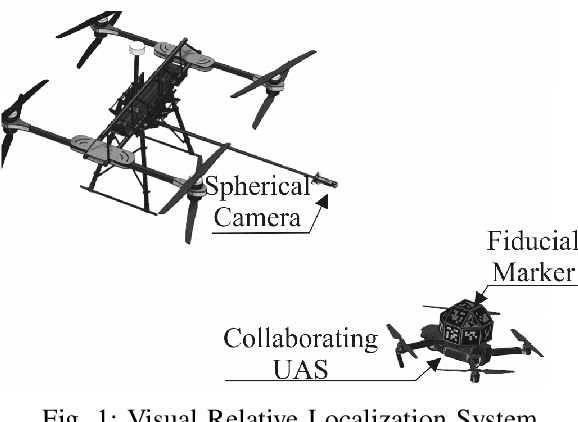
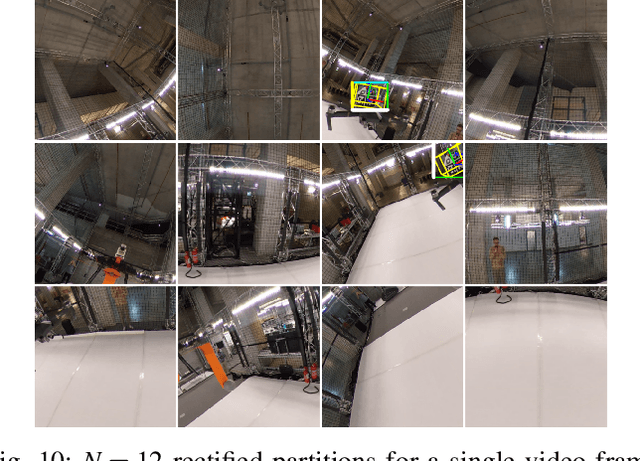

Cooperative Unmanned Aerial Systems (UASs) in GPS-denied environments demand an accurate pose-localization system to ensure efficient operation. In this paper we present a novel visual relative localization system capable of monitoring a 360$^o$ Field-of-View (FoV) in the immediate surroundings of the UAS using a spherical camera. Collaborating UASs carry a set of fiducial markers which are detected by the camera-system. The spherical image is partitioned and rectified into a set of square images. An algorithm is proposed to select the number of images that balances the computational load while maintaining a minimum tracking-accuracy level. The developed system tracks UASs in the vicinity of the spherical camera and experimental studies using two UASs are offered to validate the performance of the relative visual localization against that of a motion capture system.