 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeRelative Visual Localization for Unmanned Aerial Systems
Paper and Code
Mar 04, 2020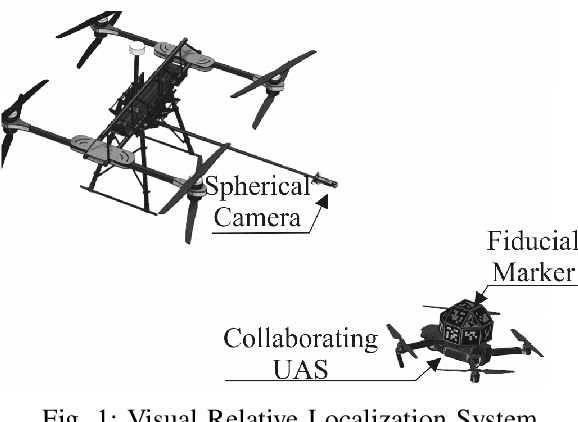
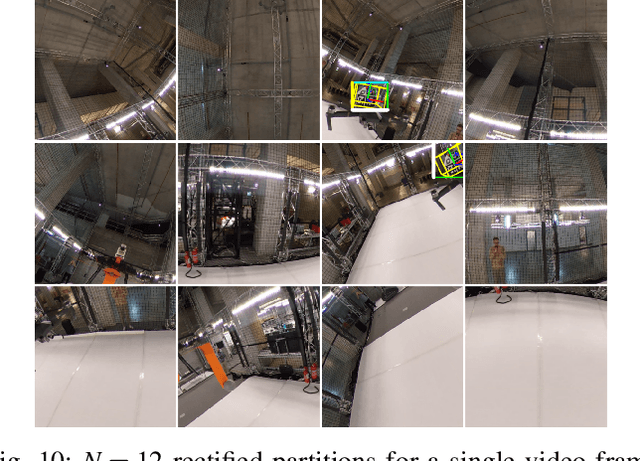

Cooperative Unmanned Aerial Systems (UASs) in GPS-denied environments demand an accurate pose-localization system to ensure efficient operation. In this paper we present a novel visual relative localization system capable of monitoring a 360$^o$ Field-of-View (FoV) in the immediate surroundings of the UAS using a spherical camera. Collaborating UASs carry a set of fiducial markers which are detected by the camera-system. The spherical image is partitioned and rectified into a set of square images. An algorithm is proposed to select the number of images that balances the computational load while maintaining a minimum tracking-accuracy level. The developed system tracks UASs in the vicinity of the spherical camera and experimental studies using two UASs are offered to validate the performance of the relative visual localization against that of a motion capture system.