 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgePhysics-informed DeepONet with stiffness-based loss functions for structural response prediction
Sep 02, 2024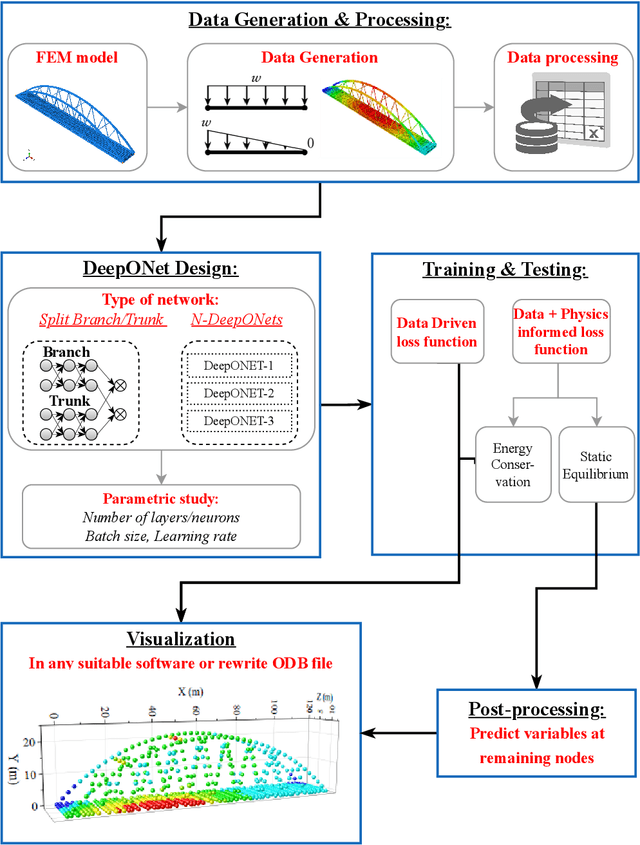
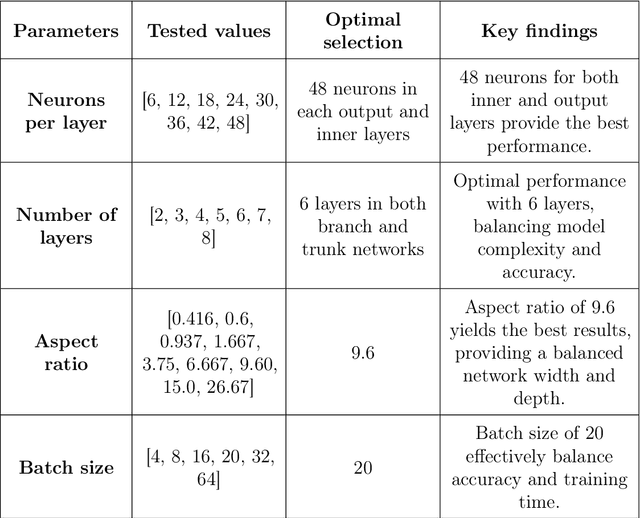
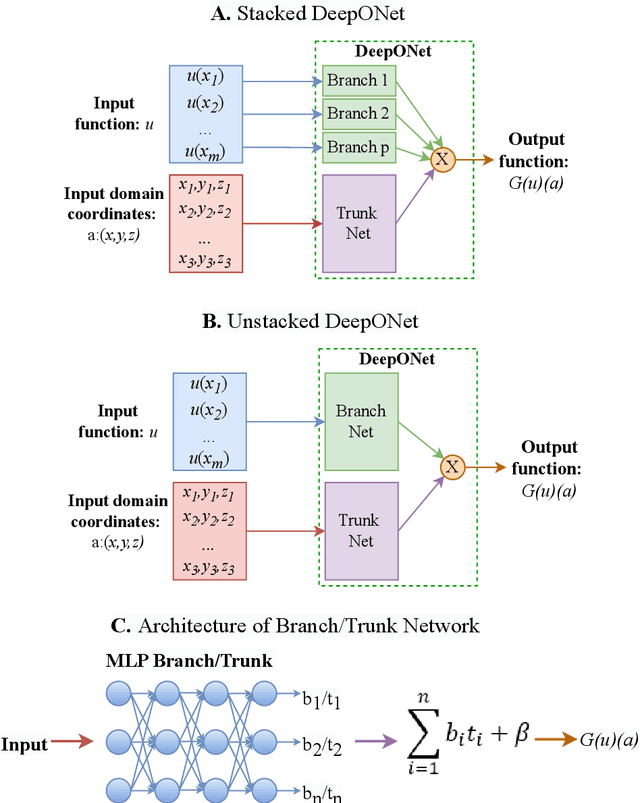
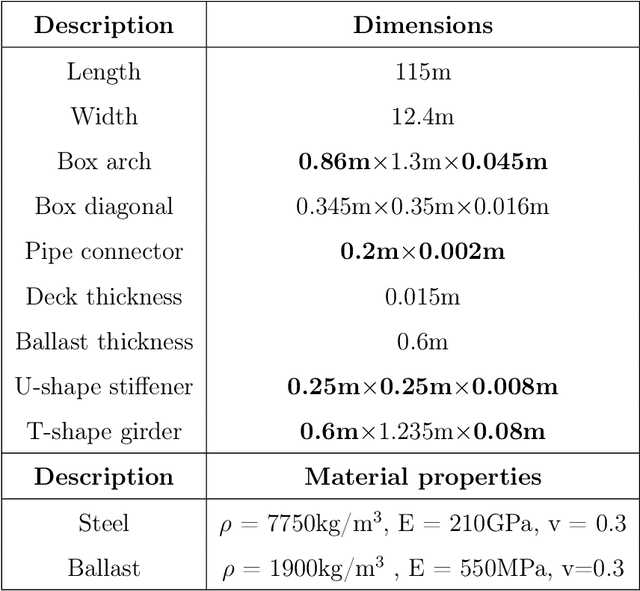
Finite element modeling is a well-established tool for structural analysis, yet modeling complex structures often requires extensive pre-processing, significant analysis effort, and considerable time. This study addresses this challenge by introducing an innovative method for real-time prediction of structural static responses using DeepOnet which relies on a novel approach to physics-informed networks driven by structural balance laws. This approach offers the flexibility to accurately predict responses under various load classes and magnitudes. The trained DeepONet can generate solutions for the entire domain, within a fraction of a second. This capability effectively eliminates the need for extensive remodeling and analysis typically required for each new case in FE modeling. We apply the proposed method to two structures: a simple 2D beam structure and a comprehensive 3D model of a real bridge. To predict multiple variables with DeepONet, we utilize two strategies: a split branch/trunk and multiple DeepONets combined into a single DeepONet. In addition to data-driven training, we introduce a novel physics-informed training approaches. This method leverages structural stiffness matrices to enforce fundamental equilibrium and energy conservation principles, resulting in two novel physics-informed loss functions: energy conservation and static equilibrium using the Schur complement. We use various combinations of loss functions to achieve an error rate of less than 5% with significantly reduced training time. This study shows that DeepONet, enhanced with hybrid loss functions, can accurately and efficiently predict displacements and rotations at each mesh point, with reduced training time.
Damage identification for bridges using machine learning: Development and application to KW51 bridge
Aug 06, 2024



Over the past few decades, structural health monitoring (SHM) has drawn significant attention to identifying damage in structures. However, there are open challenges related to the efficiency and applicability of the existing damage identification approaches. This paper proposes an effective approach that integrates both modal analysis and dynamic analysis strategies for damage identification and applies it to the KW51 railway bridge in Leuven, Belgium. The ML-based damage identification utilizes four types of features: modal analysis input, frequency characteristics, time-frequency characteristics, and stacked time series feature extraction from forced acceleration response. Signal processing methods such as stacking, Fourier transform, and wavelet transform are employed to extract damage-sensitive features from the acceleration series. The ML methods, including the k-nearest neighbors (kNN) algorithm, stacked gated recurrent unit (stacked GRU) network, and convolutional neural network (CNN), are then combined to assess the existence, extent, and location of damage. The proposed method is applied to the KW51 railway bridge. A finite element model (FEM) of the KW51 bridge is developed, which is validated by modal analysis. Various extents and locations of damage are simulated to generate the "Damaged" data, while the "Intact" data from FEM or measured data serve as a baseline for comparison. The identification results for the KW51 bridge demonstrate the high accuracy and robustness of the proposed approach, confirming its effectiveness in damage identification problems.
Automating lookahead planning using site appearance and space utilization
Nov 30, 2023



This study proposes a method to automate the development of lookahead planning. The proposed method uses construction material conditions (i.e., appearances) and site space utilization to predict task completion rates. A Gated Recurrent Unit (GRU) based Recurrent Neural Network (RNN) model was trained using a segment of a construction project timeline to estimate completion rates of tasks and propose data-aware lookahead plans. The proposed method was evaluated in a sample construction project involving finishing works such as plastering, painting, and installing electrical fixtures. The results show that the proposed method can assist with developing automated lookahead plans. In doing so, this study links construction planning with actual events at the construction site. It extends the traditional scheduling techniques and integrates a broader spectrum of site spatial constraints into lookahead planning.
Multi-agent robotic systems and exploration algorithms: Applications for data collection in construction sites
Nov 02, 2023The construction industry has been notoriously slow to adopt new technology and embrace automation. This has resulted in lower efficiency and productivity compared to other industries where automation has been widely adopted. However, recent advancements in robotics and artificial intelligence offer a potential solution to this problem. In this study, a methodology is proposed to integrate multi-robotic systems in construction projects with the aim of increasing efficiency and productivity. The proposed approach involves the use of multiple robot and human agents working collaboratively to complete a construction task. The methodology was tested through a case study that involved 3D digitization of a small, occluded space using two robots and one human agent. The results show that integrating multi-agent robotic systems in construction can effectively overcome challenges and complete tasks efficiently. The implications of this study suggest that multi-agent robotic systems could revolutionize the industry.
Developing a Free and Open-source Automated Building Exterior Crack Inspection Software for Construction and Facility Managers
Jun 20, 2022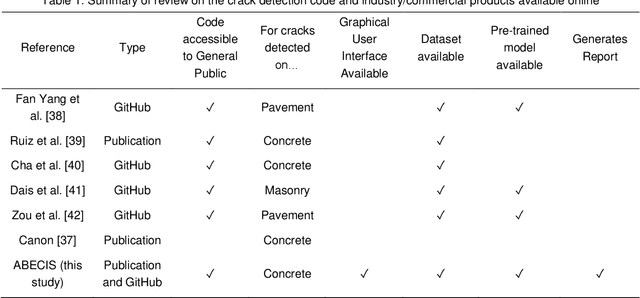



Inspection of cracks is an important process for properly monitoring and maintaining a building. However, manual crack inspection is time-consuming, inconsistent, and dangerous (e.g., in tall buildings). Due to the development of open-source AI technologies, the increase in available Unmanned Aerial Vehicles (UAVs) and the availability of smartphone cameras, it has become possible to automate the building crack inspection process. This study presents the development of an easy-to-use, free and open-source Automated Building Exterior Crack Inspection Software (ABECIS) for construction and facility managers, using state-of-the-art segmentation algorithms to identify concrete cracks and generate a quantitative and qualitative report. ABECIS was tested using images collected from a UAV and smartphone cameras in real-world conditions and a controlled laboratory environment. From the raw output of the algorithm, the median Intersection over Unions for the test experiments is (1) 0.686 for indoor crack detection experiment in a controlled lab environment using a commercial drone, (2) 0.186 for indoor crack detection at a construction site using a smartphone and (3) 0.958 for outdoor crack detection on university campus using a commercial drone. These IoU results can be improved significantly to over 0.8 when a human operator selectively removes the false positives. In general, ABECIS performs best for outdoor drone images, and combining the algorithm predictions with human verification/intervention offers very accurate crack detection results. The software is available publicly and can be downloaded for out-of-the-box use at: https://github.com/SMART-NYUAD/ABECIS