 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeMulti-agent robotic systems and exploration algorithms: Applications for data collection in construction sites
Nov 02, 2023The construction industry has been notoriously slow to adopt new technology and embrace automation. This has resulted in lower efficiency and productivity compared to other industries where automation has been widely adopted. However, recent advancements in robotics and artificial intelligence offer a potential solution to this problem. In this study, a methodology is proposed to integrate multi-robotic systems in construction projects with the aim of increasing efficiency and productivity. The proposed approach involves the use of multiple robot and human agents working collaboratively to complete a construction task. The methodology was tested through a case study that involved 3D digitization of a small, occluded space using two robots and one human agent. The results show that integrating multi-agent robotic systems in construction can effectively overcome challenges and complete tasks efficiently. The implications of this study suggest that multi-agent robotic systems could revolutionize the industry.
Developing a Free and Open-source Automated Building Exterior Crack Inspection Software for Construction and Facility Managers
Jun 20, 2022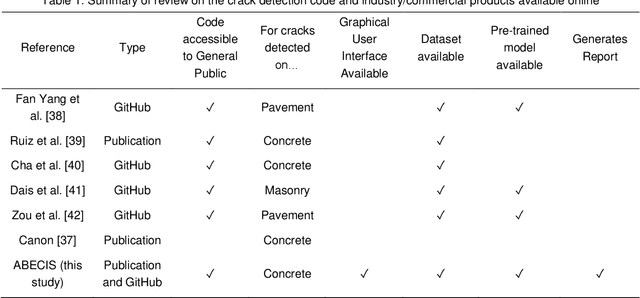



Inspection of cracks is an important process for properly monitoring and maintaining a building. However, manual crack inspection is time-consuming, inconsistent, and dangerous (e.g., in tall buildings). Due to the development of open-source AI technologies, the increase in available Unmanned Aerial Vehicles (UAVs) and the availability of smartphone cameras, it has become possible to automate the building crack inspection process. This study presents the development of an easy-to-use, free and open-source Automated Building Exterior Crack Inspection Software (ABECIS) for construction and facility managers, using state-of-the-art segmentation algorithms to identify concrete cracks and generate a quantitative and qualitative report. ABECIS was tested using images collected from a UAV and smartphone cameras in real-world conditions and a controlled laboratory environment. From the raw output of the algorithm, the median Intersection over Unions for the test experiments is (1) 0.686 for indoor crack detection experiment in a controlled lab environment using a commercial drone, (2) 0.186 for indoor crack detection at a construction site using a smartphone and (3) 0.958 for outdoor crack detection on university campus using a commercial drone. These IoU results can be improved significantly to over 0.8 when a human operator selectively removes the false positives. In general, ABECIS performs best for outdoor drone images, and combining the algorithm predictions with human verification/intervention offers very accurate crack detection results. The software is available publicly and can be downloaded for out-of-the-box use at: https://github.com/SMART-NYUAD/ABECIS