 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeEvaluation of a Smart Mobile Robotic System for Industrial Plant Inspection and Supervision
Feb 12, 2024



Automated and autonomous industrial inspection is a longstanding research field, driven by the necessity to enhance safety and efficiency within industrial settings. In addressing this need, we introduce an autonomously navigating robotic system designed for comprehensive plant inspection. This innovative system comprises a robotic platform equipped with a diverse array of sensors integrated to facilitate the detection of various process and infrastructure parameters. These sensors encompass optical (LiDAR, Stereo, UV/IR/RGB cameras), olfactory (electronic nose), and acoustic (microphone array) capabilities, enabling the identification of factors such as methane leaks, flow rates, and infrastructural anomalies. The proposed system underwent individual evaluation at a wastewater treatment site within a chemical plant, providing a practical and challenging environment for testing. The evaluation process encompassed key aspects such as object detection, 3D localization, and path planning. Furthermore, specific evaluations were conducted for optical methane leak detection and localization, as well as acoustic assessments focusing on pump equipment and gas leak localization.
A Smart Robotic System for Industrial Plant Supervision
Sep 01, 2023


In today's chemical plants, human field operators perform frequent integrity checks to guarantee high safety standards, and thus are possibly the first to encounter dangerous operating conditions. To alleviate their task, we present a system consisting of an autonomously navigating robot integrated with various sensors and intelligent data processing. It is able to detect methane leaks and estimate its flow rate, detect more general gas anomalies, recognize oil films, localize sound sources and detect failure cases, map the environment in 3D, and navigate autonomously, employing recognition and avoidance of dynamic obstacles. We evaluate our system at a wastewater facility in full working conditions. Our results demonstrate that the system is able to robustly navigate the plant and provide useful information about critical operating conditions.
Scheduled Intrinsic Drive: A Hierarchical Take on Intrinsically Motivated Exploration
Mar 18, 2019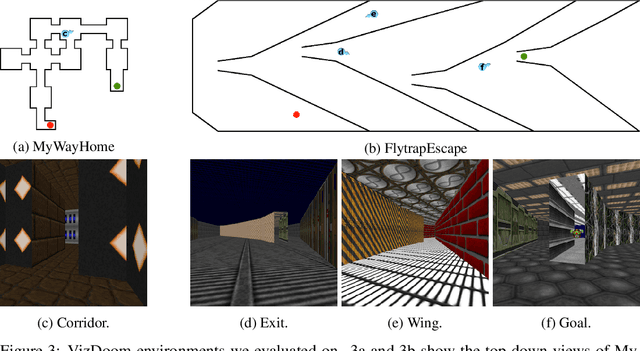
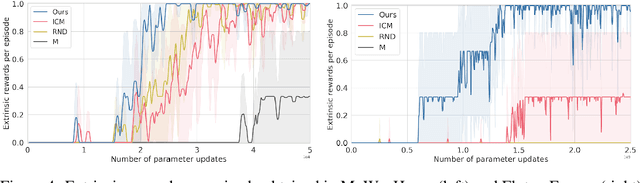
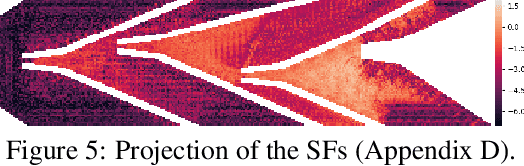
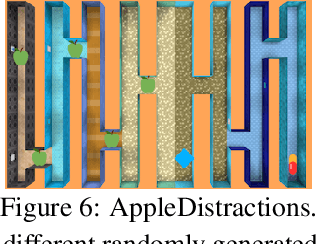
Exploration in sparse reward reinforcement learning remains a difficult open challenge. Many state-of-the-art methods use intrinsic motivation to complement the sparse extrinsic reward signal, giving the agent more opportunities to receive feedback during exploration. Most commonly, these signals are added as bonus rewards, which results in the mixture policy faithfully conducting neither exploration nor task fulfillment for an extended amount of time. In this paper, we instead learn separate intrinsic and extrinsic task policies and schedule between these different drives to accelerate exploration and stabilize learning. Moreover, we introduce a new type of intrinsic reward denoted as successor feature control (SFC), which is general and not task-specific. It takes into account statistics over complete trajectories and thus differs from previous methods that only use local information to evaluate intrinsic motivation. We evaluate our proposed scheduled intrinsic drive (SID) agent using three different environments with pure visual inputs: VizDoom, DeepMind Lab and OpenAI Gym classic control from pixels. The results show a greatly improved exploration efficiency with SFC and the hierarchical usage of the intrinsic drives. A video of our experimental results can be found at https://youtu.be/4ZHcBo7006Y.