 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeEvaluation of a Smart Mobile Robotic System for Industrial Plant Inspection and Supervision
Feb 12, 2024



Automated and autonomous industrial inspection is a longstanding research field, driven by the necessity to enhance safety and efficiency within industrial settings. In addressing this need, we introduce an autonomously navigating robotic system designed for comprehensive plant inspection. This innovative system comprises a robotic platform equipped with a diverse array of sensors integrated to facilitate the detection of various process and infrastructure parameters. These sensors encompass optical (LiDAR, Stereo, UV/IR/RGB cameras), olfactory (electronic nose), and acoustic (microphone array) capabilities, enabling the identification of factors such as methane leaks, flow rates, and infrastructural anomalies. The proposed system underwent individual evaluation at a wastewater treatment site within a chemical plant, providing a practical and challenging environment for testing. The evaluation process encompassed key aspects such as object detection, 3D localization, and path planning. Furthermore, specific evaluations were conducted for optical methane leak detection and localization, as well as acoustic assessments focusing on pump equipment and gas leak localization.
A Smart Robotic System for Industrial Plant Supervision
Sep 01, 2023


In today's chemical plants, human field operators perform frequent integrity checks to guarantee high safety standards, and thus are possibly the first to encounter dangerous operating conditions. To alleviate their task, we present a system consisting of an autonomously navigating robot integrated with various sensors and intelligent data processing. It is able to detect methane leaks and estimate its flow rate, detect more general gas anomalies, recognize oil films, localize sound sources and detect failure cases, map the environment in 3D, and navigate autonomously, employing recognition and avoidance of dynamic obstacles. We evaluate our system at a wastewater facility in full working conditions. Our results demonstrate that the system is able to robustly navigate the plant and provide useful information about critical operating conditions.
Self-Supervised Flow Estimation using Geometric Regularization with Applications to Camera Image and Grid Map Sequences
Apr 17, 2019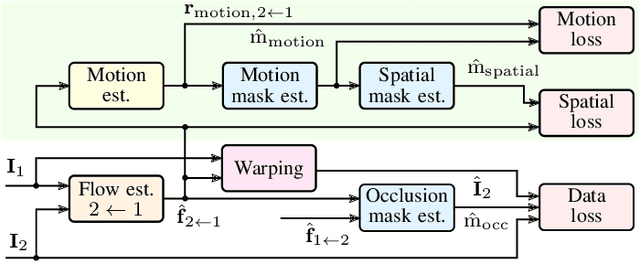
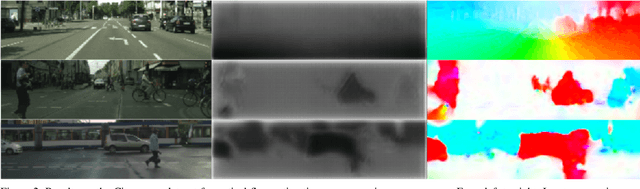
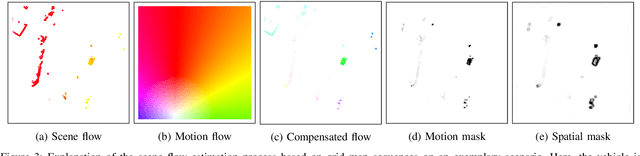
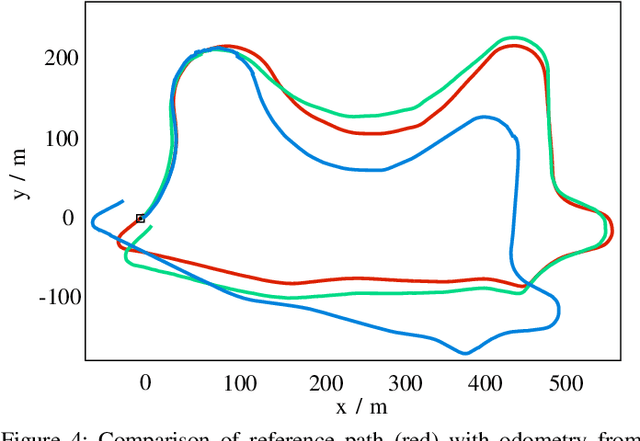
We present a self-supervised approach to estimate flow in camera image and top-view grid map sequences using fully convolutional neural networks in the domain of automated driving. We extend existing approaches for self-supervised optical flow estimation by adding a regularizer expressing motion consistency assuming a static environment. However, as this assumption is violated for other moving traffic participants we also estimate a mask to scale this regularization. Adding a regularization towards motion consistency improves convergence and flow estimation accuracy. Furthermore, we scale the errors due to spatial flow inconsistency by a mask that we derive from the motion mask. This improves accuracy in regions where the flow drastically changes due to a better separation between static and dynamic environment. We apply our approach to optical flow estimation from camera image sequences, validate on odometry estimation and suggest a method to iteratively increase optical flow estimation accuracy using the generated motion masks. Finally, we provide quantitative and qualitative results based on the KITTI odometry and tracking benchmark for scene flow estimation based on grid map sequences. We show that we can improve accuracy and convergence when applying motion and spatial consistency regularization.